Smart Parking Assistant
Student: Hemrayev Yslam Group: 1241Ec GitHub Project Link: https://github.com/UPB-PMRust-Students/project-dm-2025-Islam7681
Description
The goal of the project is to create a functional parking assistant system using Rust. The hardware detects obstacles using ultrasonic sensors and provides visual and audio feedback to the driver to prevent collisions.
Motivation
I chose this project to gain hands-on experience with embedded Rust and the embassy-rs framework. Parking safety is a real-world problem, and I wanted to explore more how the modern cars have the parking assitant and how it actully works.
Architecture
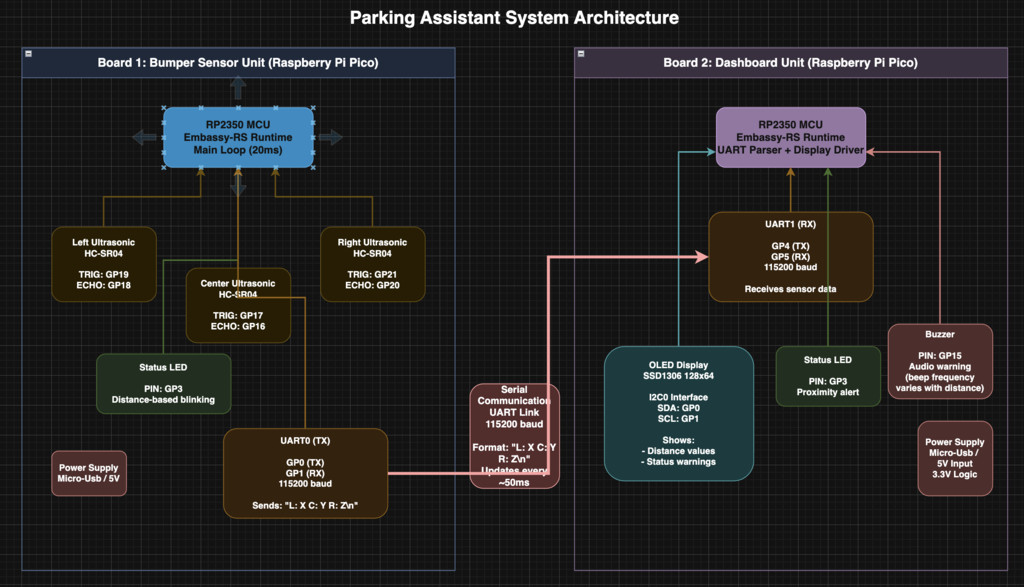
The system is divided into two modules connected by a UART serial line:
- Bumper Module: Reads data from 3x HC-SR04 ultrasonic sensors.
- Dashboard Module: Receives the distance data, calculates the "danger level," and updates the OLED display and buzzer.
Diagram
Log
Week 5 - 6
Got approved by the professor regarding the project topic. Decided to use embassy-rs for its async capabilities. Then ordered all the components
Week 7 - 9
Components arrived. Started with basic hardware tests: blinking an LED on the Pico and reading raw timing data from a single HC-SR04 sensor using GPIO pins.
Week 10 - 12
Made all the hardware wiring for both boards. Implemented the UART communication protocol. Connected two Picos together and successfully.
Week 13 - 14
Finalized the software logic. Implemented the "Panic Mode" where the buzzer beeps faster as the object gets closer. Cleaned up the code, added comments and final test and cleanups.
Hardware Design
The project uses the Raspberry Pi Pico2W (RP2350).
- Sensors: HC-SR04 ultrasonic sensors.
- Display: SSD1306 OLED (I2C connection).
- Audio: Active Buzzer.
Schematics

Bill of Materials
| Device | Usage | Price |
|---|---|---|
| Raspberry Pi Pico 2W (x2) | The microcontrollers for both nodes | 70 RON |
| HC-SR04 Sensor (x3) | Ultrasonic distance measurement | 9 RON |
| SSD1306 OLED | 0.96" Display for the dashboard | 25 RON |
| Active Buzzer | Audio alert system | 5 RON |
| Jumper Wires | Wiring | 5 RON |
| LED (x2) | For visuals | 4 RON |
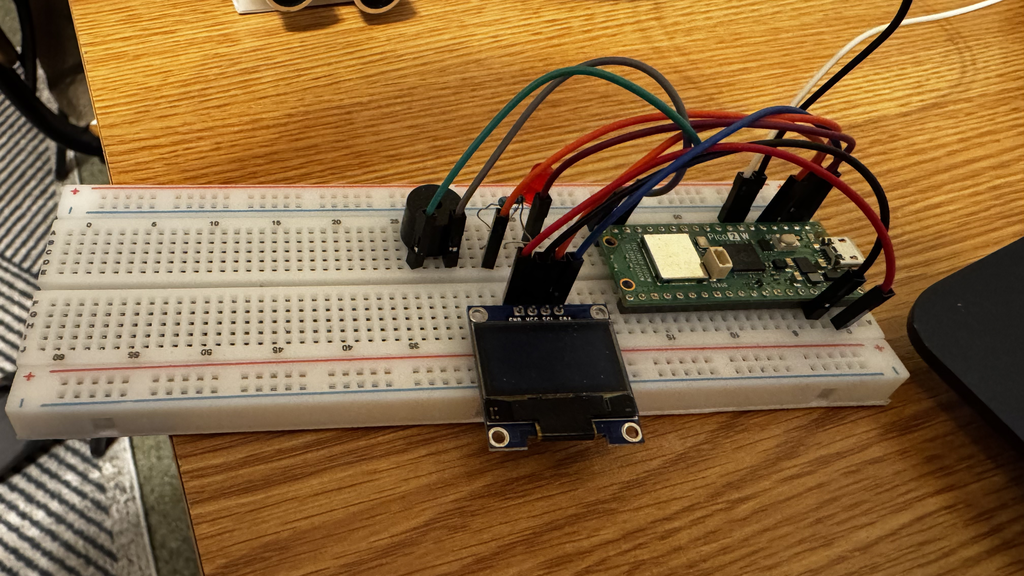
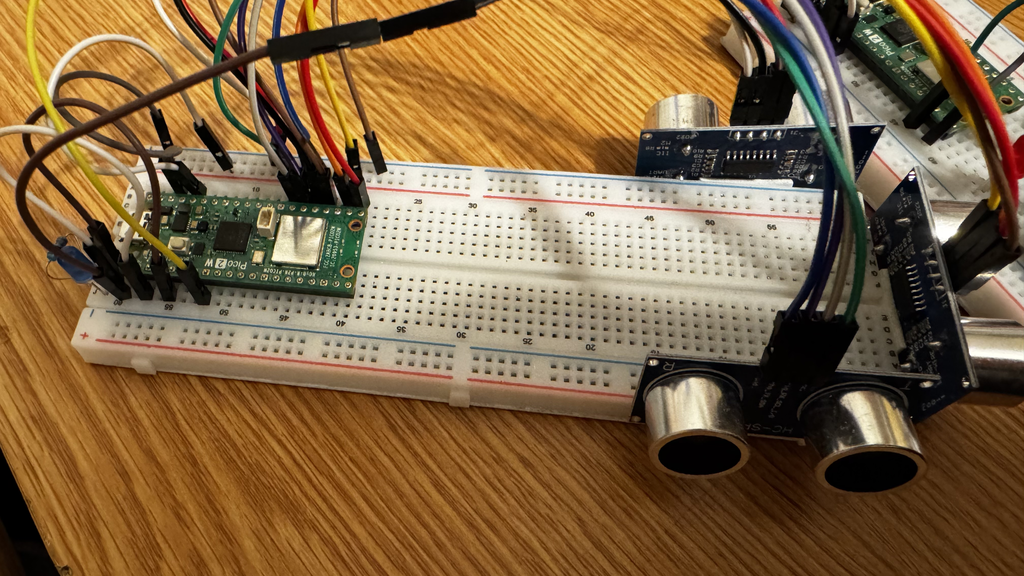
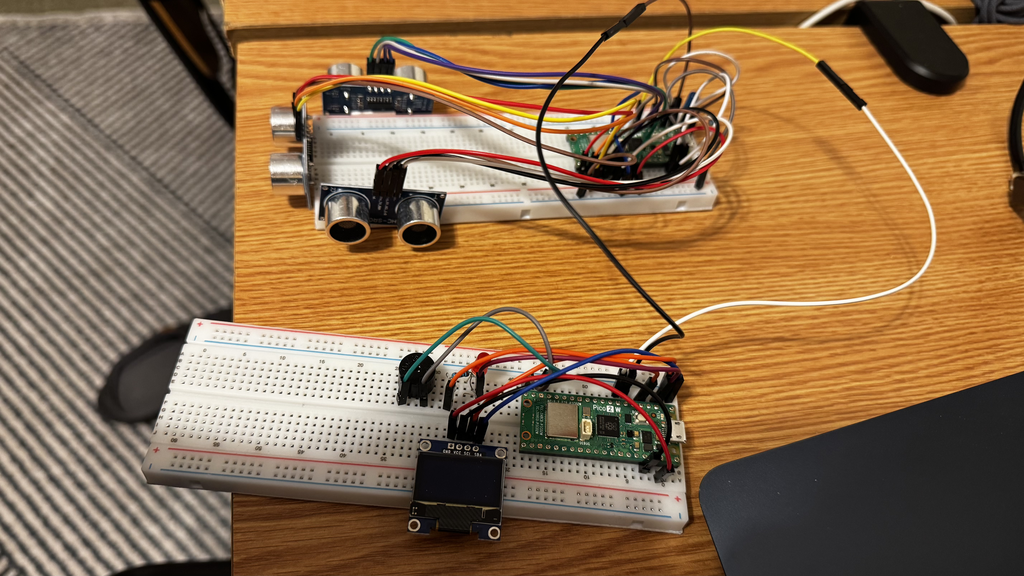
Photos of the Device
Software
| Library | Description | Usage |
|---|---|---|
embassy-rp | HAL for RP2350 | Controls GPIO, UART, I2C, and DMA on the Raspberry Pi Pico 2W. |
embassy-executor | Async Executor | Runs the concurrent tasks (e.g., the sensor loop and the sending loop). |
ssd1306 | Display Driver | Drives the OLED screen over I2C (dashboard node). |
embedded-graphics | Graphics Library | Draws the UI text and lines on the display buffer. |
heapless | Static Memory | Provides fixed-size String buffers to format messages without using an allocator. |
Software Design
The software is written in Rust using embassy-rs on the RP2350 architecture.
- Bumper Firmware: Runs a continuous loop measuring distances from three sensors sequentially to avoid ultrasonic interference. It serializes the data into a compact string format and transmits it via UART.
- Dashboard Firmware: Runs two asynchronous tasks:
- Alerter Task: Monitors the shared "danger level" state and controls the buzzer/LED frequency (fast beeping for panic mode, slow for warning).
- Main Task: Parses incoming UART messages, updates the shared state, and redraws the OLED interface using
embedded-graphics.