DriveSight
A mobile robot project with a camera for visual tracking, based on a Raspberry Pi Pico 2W and ESP32-S3.
Author: Neagu Andrei-Cristian
GitHub Project Link: https://github.com/UPB-PMRust-Students/project-mohgTheOmen.git
Description
DriveSight is a manually controlled robotic platform equipped with real-time video streaming. It integrates a camera module for live feed monitoring and a wireless controller interface for direct motor control, providing precise, remote navigation and situational awareness.
Motivation
I started this project to challenge myself and explore how far I could push the capabilities of embedded hardware, combining real-time control, wireless communication, and camera streaming on constrained systems.
Architecture
Main Components:
- Raspberry Pi Pico 2W (Motor Controller): Controls motors, ultrasonic sensors, and receives movement commands via UART.
- ESP32-S3: Captures a live camera feed and sends control commands from a connected Bluetooth controller.
- Raspberry Pi Pico 2W (Display Host): Hosts a Wi-Fi access point and receives data from the motor controller to display real-time sensor values or system status on a small screen.
Feedback Mechanisms:
- Current sensors (INA219): Monitor motor current to help maintain consistent speed across varying surface conditions.
- Ultrasonic sensors: Provide obstacle detection and distance feedback for navigation and collision avoidance.
User Interface:
- Web-based interface: Hosted on the ESP32-S3 for viewing the live camera feed.
- Bluetooth controller: Used for manual driving input.
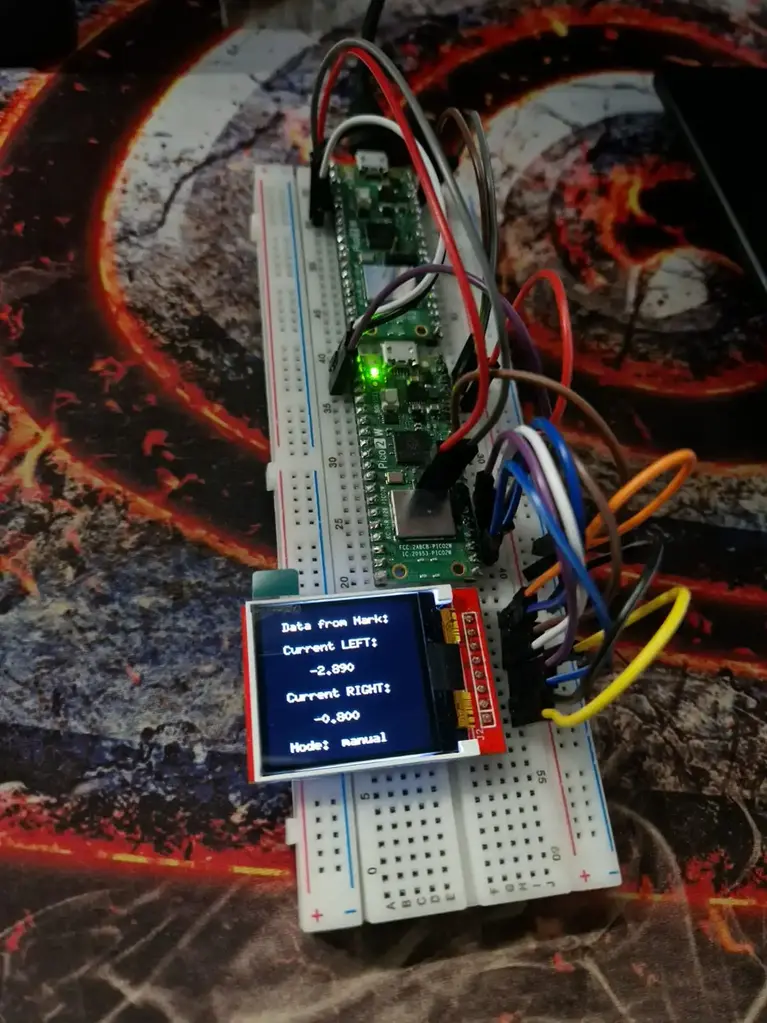
- On-board display: Connected to Pico no.2, shows live telemetry from the motor controller over Wi-Fi.
Connections Between Components:
- UART: Used for communication between the ESP32-S3 and motor controller Pico.
- Wi-Fi: Motor controller Pico connects to the display host Pico (AP mode) for data transmission.
- I2C: Used by the motor controller Pico for reading data from INA219 current and ultrasonic sensors.
- GPIO: Used to control the L298N motor driver from the motor controller Pico.

Log
Week 21 - 27 April
- Tested components individually.
Week 28 April - 4 May
- Configured the ESP32-S3 to connect to a Wi-Fi network and stream the live camera feed. This involved setting up the
esp_cameralibrary for capturing frames and integrating it with theESP-IDFnetworking stack. - Configured the second Raspberry Pi Pico to display telemetry data received via TCP from the central Pico.
Week 5 - 11 May
- Tested UART communication between the ESP32-S3 and the motor controller Pico 2W to ensure reliable data exchange.
- Developed the motor control functionality to process commands received from the Bluetooth controller.
Week 12 - 18 May
- Integrated motor movement logic to dynamically adjust based on proximity feedback from the ultrasonic sensors.
- Began designing the chassis for the robot, focusing on structural stability and accommodating all hardware components.
Week 19 - 25 May
- Completed hardware assembly for the robot, including wiring and mounting all components.
- Developed and integrated software for the distance sensors, enabling them to function as parking sensors with real-time feedback on the remote display.
- Implemented motor control logic to respond to Bluetooth controller input, allowing for precise manual driving.
- Most core features are functional; only finishing touches and minor bug fixes remain.
Week 26 - 30 May
- Finalized integration tests for all hardware modules to ensure stable operation during the PM Fair.
- Verified live camera streaming, Bluetooth controller input, and telemetry display on the remote unit.
- Performed a full system demo run to check for any last-minute issues and confirmed all features are presentation-ready.
- Recorded the demo video and assembled all components into the 3D-printed housings.
Project Demo
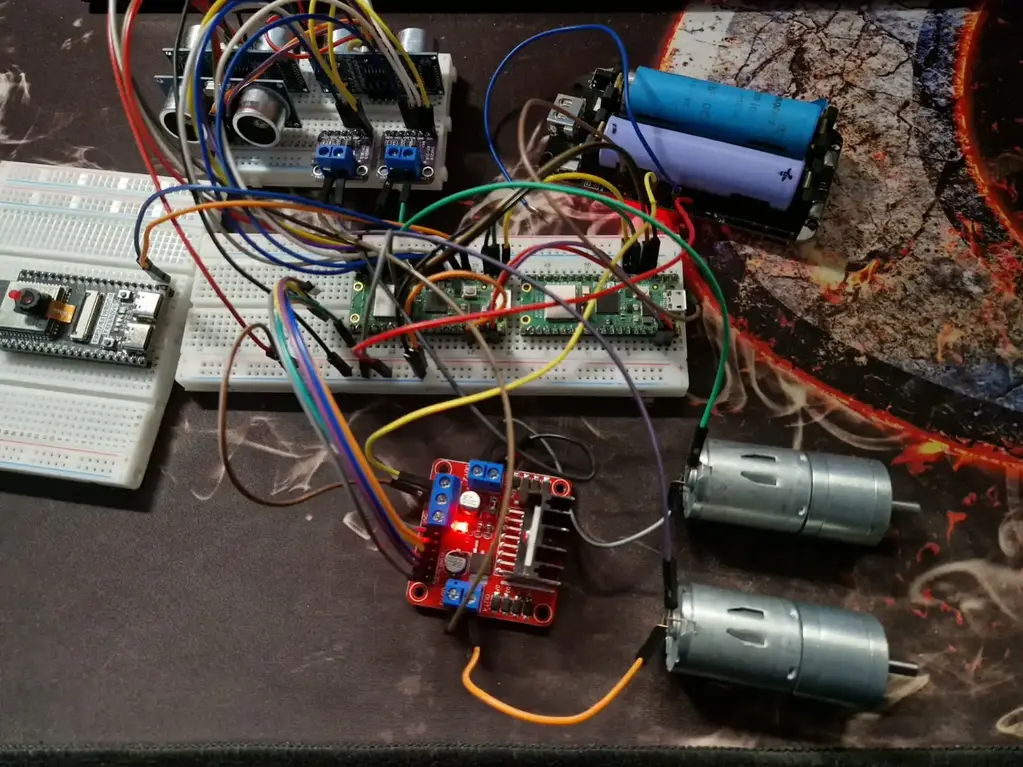
Hardware
- Raspberry Pi Pico 2W: Main controller handling sensors and motor control.
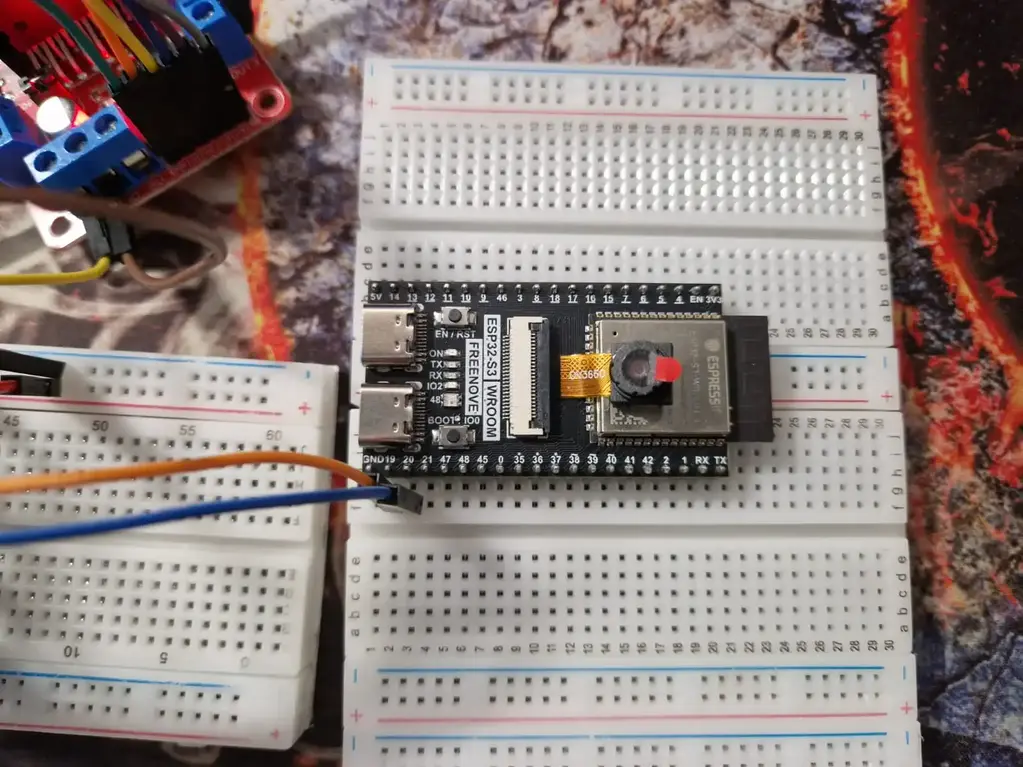
- ESP32-S3: Provides camera feed for object tracking and sends control commands.
- Raspberry Pi Pico 2W (Display Unit): Hosts an access point and displays telemetry data.
- ST7735s: Display the telemetry data.
- L298N Motor Driver: Drives the two DC motors.
- 2× DC Motors: Provide movement for the robot.
- 2× INA219 Current Sensors: Monitor motor currents to detect stalls or resistance changes.
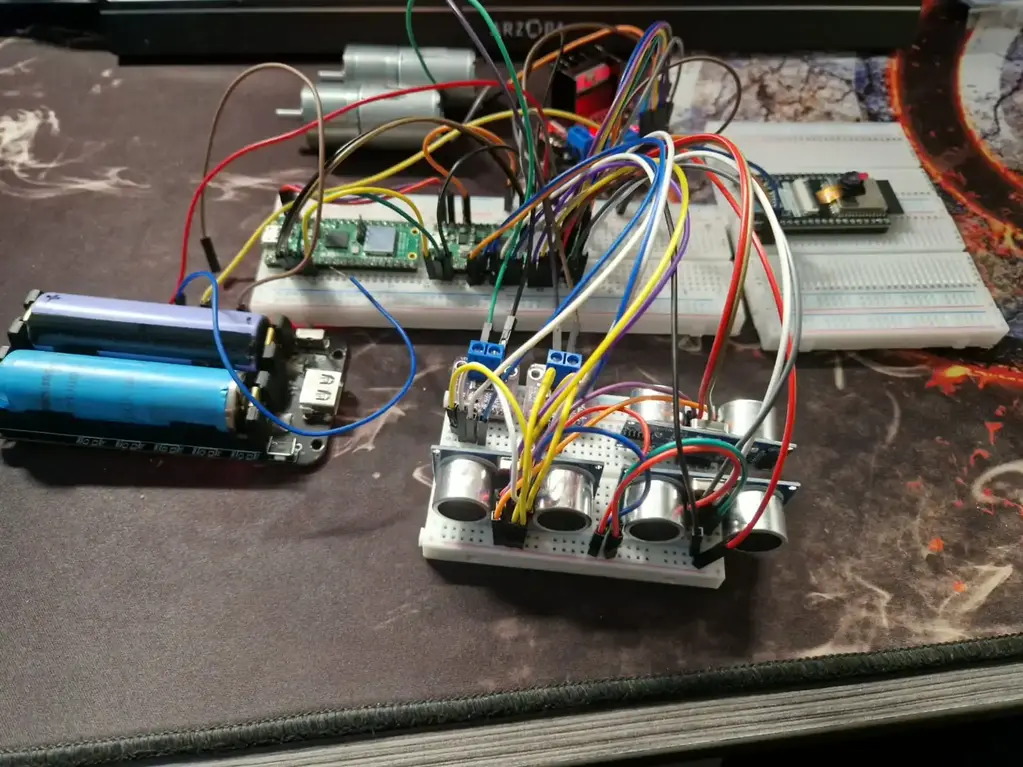
- 3× HC-SR04 Ultrasonic Sensors: Detect obstacles in front of the robot.
- Power Bank and Li-ion Batteries: Powers the system.
- Wires, Breadboard, and Connectors: For interconnecting all the components.
Pictures
Overview:
ESP32-S3:
AP Pico 2W:
Schematics
ESP32-S3:

Central Pico 2W:

AP Pico 2W:

Final Project
Main Unit

Remote

Bill of Materials
| Device | Usage | Price |
|---|---|---|
| 2x Raspberry Pi Pico 2W | Main control board | 39.66 lei |
| ESP32-S3 | Camera and Wi-Fi | 56.71 lei |
| L298N Motor Driver | Controls motor power | 10.99 lei |
| ST7735s Display | Displays sensor data | 27.99 lei |
| 2x JGA25-370 Motors | Robot movement | 49.00 lei |
| 2x INA219 Current Sensor | Current monitoring | 29.99 lei |
| 2x TLP281 Optocoupler | Signal isolation | 8.49 lei |
| 3x HC-SR04 Ultrasonic Sensor | Obstacle detection | 14.99 lei |
| Li-Ion 3x Battery Holder | Power source | 20.13 lei |
| Li-Ion 1x 18650 Battery Powerbank | Power source | 19.93 lei |
| Li-Ion 2x 18650 Battery Powerbank | Power source | 30.35 lei |
| Wires, Connectors, Breadboard, Resistors | Wiring | Already had them |
Software
ESP32-S3 (C)
| Library | Description | Usage |
|---|---|---|
| ESP-IDF | Official Espressif IoT Development Framework | Base SDK for Wi-Fi, networking, etc. |
| esp_camera | Camera driver for OV3660 | Captures and streams MJPEG frames |
| Bluepad32 | Bluetooth game controller library | Receives input from Bluetooth controller |
Raspberry Pi Pico 2W (Rust)
| Library | Description | Usage |
|---|---|---|
| embassy | Async embedded runtime for embedded systems | Task scheduling and async infrastructure |
| embassy-executor | Asynchronous task executor | Schedules and runs tasks in a no_std async environment |
| embassy-rp | RP2040-specific HAL for Embassy | GPIO, SPI, PWM, ADC, and other peripherals |
| embassy-time | Timer and delay handling | Non-blocking frame-rate control, delays, timeouts |
| embassy-sync | Synchronization primitives | Used for async channels and mutexes |
| embassy-gpio | GPIO abstraction for Embassy | Manages input/output pins for buttons, sensors, and motor control |
| embassy-futures | Futures and async utilities for Embassy | Enables combining and managing multiple async tasks and events |
| cyw43 | Wi-Fi driver for the CYW43 chip | Connecting the Pico 2W to Wi-FI |
| cyw43-pio | PIO-based driver for the CYW43 chip | Enables Wi-Fi using the RP2350's PIO peripheral |
| embassy-net | TCP/IP networking stack | Hosts server or client for sending/receiving data |
| embedded-hal | Hardware abstraction layer for embedded systems | Standardized traits for peripherals (GPIO, I2C, SPI, etc.) |
| hcsr04-async | Async driver for ultrasonic distance sensor (if used) | Obstacle detection |
| defmt | Lightweight logging framework for embedded systems | Enables efficient, structured logging |
| defmt-rtt | RTT (Real-Time Transfer) backend for defmt | Outputs logs via RTT for real-time debugging |
| embedded-graphics | 2D graphics library for embedded systems | Drawing text, shapes, and UI elements on the display |
| mipidsi | Display driver for MIPI-compatible SPI LCDs | Driving the ST7735s display via SPI |
| rand | Random number generation | Used internally by the TCP stack for port/sequence numbers |
| smoltcp | Embedded TCP/IP networking stack | Provides low-level TCP/IP networking for the Pico 2W |
| static-cell | Safe static memory cell abstraction | Manages static data for async tasks and peripherals |
| alloc-cortex-m | Heap allocator for Cortex-M microcontrollers | Enables dynamic memory allocation in embedded Rust |
| libm | Math library for embedded systems | Provides floating-point math functions in no_std environments |
| heapless | Fixed-capacity data structures without heap | Used for queues, buffers, and collections in constrained systems |
| panic-probe | Minimal panic handler for embedded Rust | Reports panics via RTT or serial for debugging |