Smart Door Lock
A biometric-based smart door lock system utilizing facial recognition technology to enhance home security by ensuring access control through used identification.
Author: Gugulea Maria-Alexandra
GitHub Project Link: https://github.com/UPB-PMRust-Students/project-alexandra-gugulea
Description
This project presents the design and implemetation of a smart home security system incorporating a facial recognition-based smart door lock, developed using the Raspberry Pi Pico W Microcontroller. The system integrates multiple sensors and modules to ensure robust access control and tamper detection.
A PIR motion sensor continously monitors for movement near the entrace and, upon detection, activates an ESP32-CAM module, which captures an image of the approaching individual. Facial recognition is then performed to determine user authorization. If a match is found, a servo motor is engaged to unlock the door. In addition, an SW-420 vibration sensor is embedded in the door handle to detect unusual vibrations or tampering attempts. Together, these components provide a multi-layered security system that combines biometric authentication, motion detection, and physical disturbance monitoring to enhance residential safety in an efficient and cost-effective manner.
Motivation
In an age where smart technologies are becoming increasingly integrated into daily life, ensuring home security through intelligent systems is more important than ever. This project was motivated by the need to develop a more secure, responsive, and user-friendly home entry system that leverages facial recognition and tamper detection.
By combining biometric access control with motion and vibration sensing, the system aims to create a multi-layered defense mechanism against intrusion.
Architecture
1. Raspberry Pi Pico W
The Raspberry Pi Pico W functions as the central controller of the smart home security system. It coordinates all operations by interfacing with peripheral modules through GPIO and UART communication.
Upon receiving input from the PIR motion sensor, it sends a command to the ESP32-CAM to capture an image for facial recognition. Based on the response from the ESP32-CAM, the Pico W activates the servo motor to unlock the door if access is authorized.
2. SW-420 Vibration Sensor
The SW-420 vibration sensor is used to detect physical disturbances , such as shaking or tampering attemptsat the door. It is installed on or near the door handle and generates a digital signal when vibrations exceed a set threshold.
This signal is read by the Raspberry Pi Pico W, which then processes the event as a potential security breach. IN response, the system can activate the buzzer to alert nearby individuals. This component serves as a tamper-detection layer in the multi-tiered security framework.
3. PIR Motion Sensor
The Passive Infrared (PIR) motion sensor continously monitors the area near the enterance for movement. It detects changes in infrared radiation, typically caused by human presence.
When motion is detected, it sends a digital signal to the Raspberry Pi Pico W, prompting it to initiate facial recogntion via the ESP32-CAM. This mechanism ensures that the camera is only activated when necessary, conserving power and computational resources while increasing system efficiency.
4. SEN0359 Fingerprint Sensor
The SEN0359 fingerprint sensor is a compact biometric module designed for precise fingerprint capture and recognition. When triggered by the Raspberry Pi Pico W, it scans the fingerprint of the user attempting access.
Fingerprint matching is processed directly on the sensor module, comparing the scanned print against stored fingerprint templates. If a match is detected, the sensor sends a success signal back to the Pico W via UART. The SEN0359 serves as a crucial component in the biometric access system, providing reliable and secure user authentication.
5. SG90 Servo Motor
The SG90 servo motor is a miniature actuator responsible for operating the physical door locking mechanism. Controlled by a PWM signal from the Raspberry Pi Pico W, the servo motor rotates to unlock the door when an authorized face is recognized. After a short delay, it returns to its original position to re-engage the lock.
The servo's role is critical for translating electronic authentication into mechanical action, thereby completing the access control process.
6. Buzzer
The buzzer is used for generating audible alerts in the system. It is connected to the Raspberry Pi Pico W and activated in response to specific events such as tampering (from the vibration sensor) or unauthorized access attempts. It can also be used to signal successful operations such as confirmed facial match. The buzzer enhances system feedback and serves as a deterrent to unauthorized individuals.
Log
Week 14 - 18 April
I began the project by conducting research on all the components required for the build. This included reviewing datasheets, compatibility, and use cases. After finalizing the list of components, I proceeded to order them online.
Week 20 - 25 April
Once the first batch of components arrived, I started soldering or attaching pins to the sensors and the other electronic parts. I also began prototyping by placing some of the components onto the breadboards to test their fit and layout.
Week 5 - 11 May
This week focused on documentation and planning. I wrote the necessary technical documentation outlining the project's motivation and architecture.
Week 12 - 18 May
This week focused entirely creating a strong basis for the project, by ensuring that all the hardware is placed correctly and writing the first lines of code. Additionaly, I completed the hardware milestone, describing all the components used, as well as their purpose in the course of my project, whilst also adding pictures of everything I've achieved so far.
Week 19 - 25 May
This week was dedicated to writing up and finishing the code necessary for this project. In addition, I have submitted the software milestone, as well as the entirety of my code. This week, I have also focused on making the project more appealing to the eye, by diy-ing a box in the shape of a door lock, in oreder to reinforce the purpose of my project and hide all the hardware.
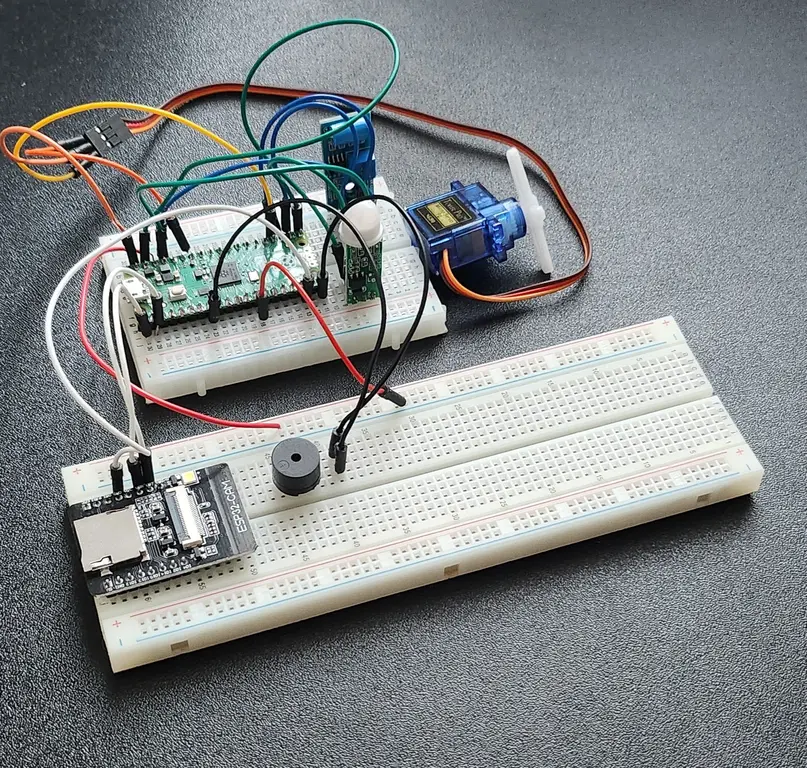
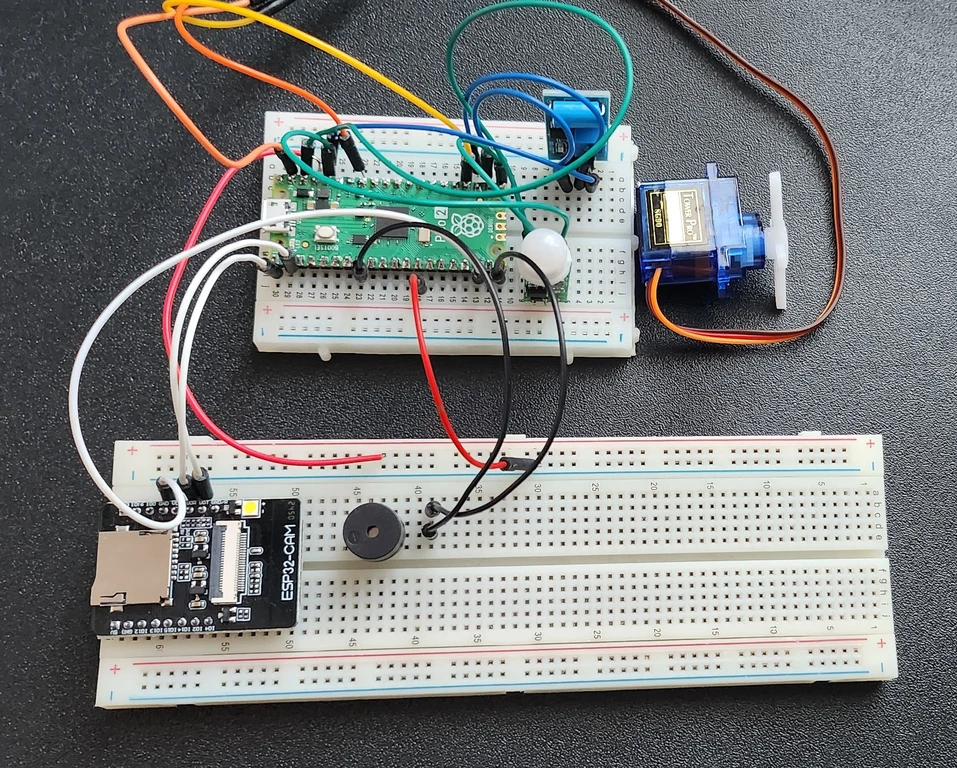
Hardware
The purpose of the hardware milestone is to assemble and validate all essential electronic components required for the smart door lock system. This ensures that each hardware component is properly connected, tested for functionality, and integrated with the Raspberry Pi Pico before advancing to software integration and logic development.
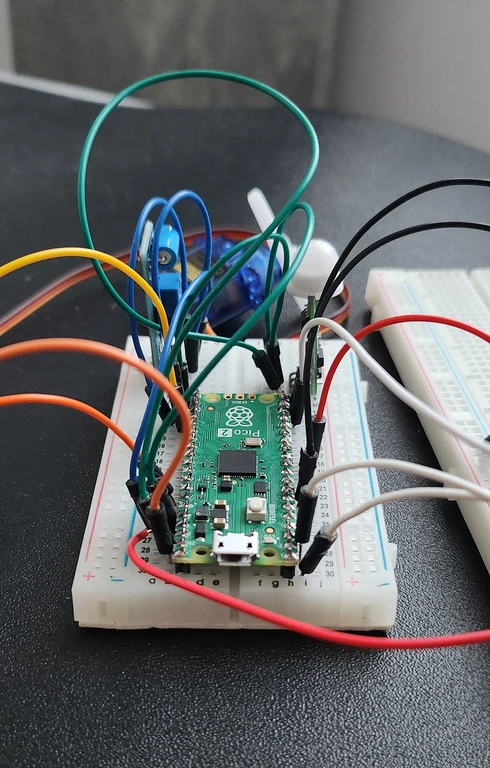
Raspberry Pi Pico
The Raspberry Pi Pico is a compact and cost-effective microcontroller board powered by the RP2040 chip. It features a dual-core ARM Cortex-M0+ processor running at up to 133 MHz, 264 KB of SRAM, and 2 MB of onboard Flash memory. It supports multiple I/O protocols including GPIO, SPI, I2C, UART, PWM, and ADC, making it versatile for embedded applications. In this project, the Pico acts as the central controller, coordinating input from sensors and controlling outputs like the servo motor.
SEN0359
The SEN0359 is a compact biometric sensor module that integrates a fingerprint scanner with onboard processing capabilities. It’s ideal for adding fingerprint recognition and secure user authentication to your system, functioning as an intelligent biometric sensor for enhanced security and access control.
HC-SR505 PIR Motion Sensor
The HC-SR505 is a mini passive infrared (PIR) motion sensor designated for small-scale embedded systems. It detects infrared radiation emitted by moving objects like humans and triggers a digital high signal when motion is detected. In this project, it is used to sense when someone approaches the door, triggering the rest of the system to evaluate further input from other sensors components.
SW-420 Vibration Sensor
The SW-420 is a vibration switch module that detects physical vibrations or shocks. It outputs a digital signal when the threshold vibration is detected, typically used in anti-theft or tamper-detection systems. In the smart door lock project, the SW-420 provides an extra layer of security by sensing forced entry attempts or unusual tampering at the door, prompting the system to sound an alert or take preventative actions.
SG90 Servo Motor
The SG90 is a micro servo motor commonly used in DIY electronics and robotics projects. It operates on a pulse width modulation (PWM) signal to rotate its output shaft between 0 and 180 degrees. In the context of the smart door lock, the servo motor physically controls the locking mechanism, opening or closing the latch when the system grants or denies access based on sensor input or other logic conditions.
Buzzer
The buzzer is a simple audio output device that emits a sound when powered. It can be driven by a GPIO pin to produce beeps or alarms, alering users to specific events such as motion detection, tampering, or successful lock/unlock actions. In this project, it serves as an auditory feedback tool to indicate system states or intrusions, enhancing the interactivity and security of the setup.
Schematics

Bill of Materials
| Device | Usage | Price |
|---|---|---|
| Raspberry Pi Pico 2W | The microcontroller that acts central controller for the smart lock system. It receives input from sensors (motion, vibration), processes logic, and controls actuators like the servo and buzzer. | 47 RON |
| SEN0359 | Planned for future enhancement to provide fingerprint verification at the door | 180 RON |
| HC-SR505 PIR Motion Sensor | Detects motion near the door. When someone approaches, it triggers the Pico to prepare for possible unlock logic. | 10 RON |
| SW-420 Vibration Sensor | Detects strong vibrations or knocks on the door | 6 RON |
| SG90 | Physically locks or unlocks a latch or bolt by rotating to a defined angle. | 10 RON |
Software
| Library | Description | Usage |
|---|---|---|
| embassy-executor | Async/await task executor for embedded systems. | Enables the #[embassy_executor::main] macro to define the asynchronous main() function and handle concurrency. |
| embassy-rp | HAL (Hardware Abstraction Layer) for Raspberry Pi Pico (RP2040) based on Embassy. | gpio: For reading inputs (PIR sensor, vibration sensor, mode button) and controlling outputs (buzzer).pwm: For controlling the servo motor that locks/unlocks the door. i2c: For communicating with the fingerprint sensor via I2C. |
| embassy-time | Time management for embedded async applications. | Used for delays and timeouts (Timer::after(...)) to pace logic, like waiting for button holds or simulating sensor communication. |
| defmt | Efficient logging framework for embedded Rust. | Used to log debug messages (info!) that help trace events like mode switching, sensor triggers, and fingerprint status |
| defmt-rtt | Sends defmt logs over RTT (Real-Time Transfer). | Allows debug logs to be viewed via RTT during development. |
| [panic-probe] (https://crates.io/crates/panic-probe) | Panic handler that outputs messages using defmt and terminates cleanly. | Provides helpful panic messages during development in case something crashes. |
| embedded-hal | Defines common embedded hardware traits like I2C, PWM, etc. | Used as a trait bound in authenticate_fingerprint and enroll_fingerprint to work with I2C generically. |