Joystick Controlled Remote Car
A mobile robot controlled in real time using an analog joystick and Rust firmware.
info
Author: Costin Chiriac
GitHub Project Link: https://github.com/UPB-PMRust-Students/fils-project-2026-CostinZXC
Description
The goal of this project is to build a responsive mobile robot based on the Raspberry Pi Pico 2W. The system allows the user to control the robot's movement (forward, backward, left and right) and speed using a 2-axis analog joystick. Additionally, the robot is equipped with an ultrasonic sensor to detect obstacles, ensuring a safer navigation by preventing collisions.
Motivation
I chose this project because I wanted to learn how to interface analog sensors (joystick) and digital distance sensors with motor actuators in a real time environment.
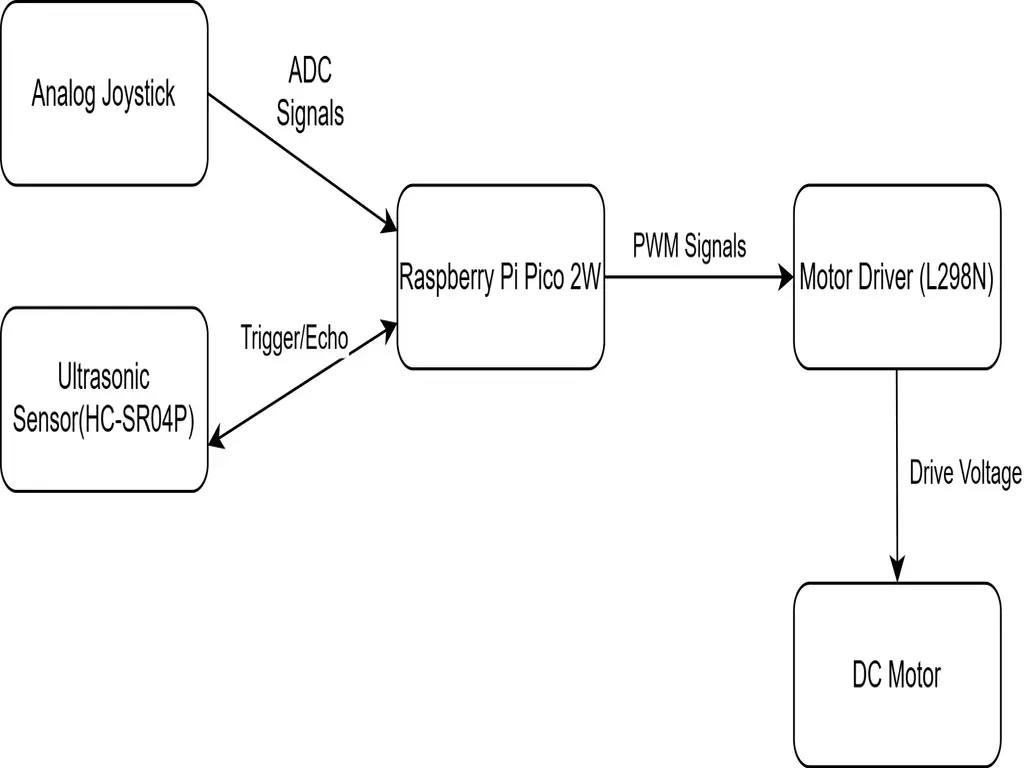
Architecture
Log
- Week 5 - 11 May
- Week 12 - 18 May
- Week 19 - 25 May
Hardware
- Raspberry Pi Pico 2W: The main controller that handles ADC readings, distance calculation and PWM generation.
- Analog Joystick: Provides the user input for direction and speed.
- Ultrasonic Sensor (HC-SR04P): Measures the distance to objects in front of the robot for collision avoidance.
- L298N Motor Driver: Acts as the power interface between the Pico and the DC motors.
- DC Motors: Provide the physical movement for the robot chassis.
Schematics
Bill of Materials
| Device | Usage | Price |
|---|---|---|
| Raspberry Pi Pico 2W x2 | Main processing unit (RP2350) | 79.00 RON |
| L298N Motor Driver | Power interface for DC motors | 10.00 RON |
| 2-Axis Analog Joystick | User input for direction and speed | 5.00 RON |
| Ultrasonic Sensor (HC-SR04P) | Obstacle avoidance | 10.00 RON |
| 2WD Robot Chassis Kit | Frame, wheels and DC motors | 50.00 RON |
Software
| Library | Description | Usage |
|---|---|---|
rp235x-hal | Hardware Abstraction Layer | GPIO, PWM and ADC control for RP2350 |
embedded-hal | Hardware abstraction traits | Ensures modularity and compatibility |
defmt | Logging framework | Efficient real-time debugging |
fugit | Timing utility | Precise PWM frequency for motor control |
panic-probe | Panic handler | Debugging support via probe-rs |