Mood Blooms: Interactive Ambient Flowers
Author: Sandru Cristina Victoria
GitHub Project Link: https://github.com/UPB-PMRust-Students/fils-project-2026-CristinaVSandru
Description
This project is an interactive installation consisting of three mechanical flowers. The project uses a Raspberry Pi Pico 2W and the Rust Embassy framework to create a non-blocking, async system. The flowers react to user input via BLE (mood selection) and environmental light levels.
Motivation
I chose this project to explore a multi-core embedded environment. I want to see how a microcontroller can handle complex animations, wireless communication, and sensor fusion simultaneously, all while creating something aesthetically pleasing.
Architecture
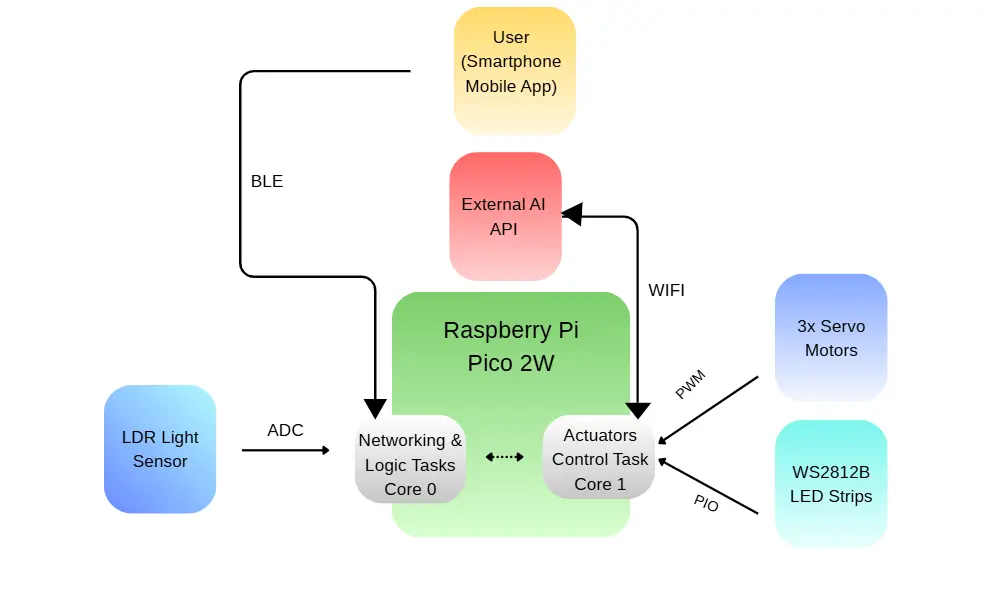
It follows a multi-tasking approach, splitting responsibilities between the MCU's two hardware cores to ensure smooth animation and responsive networking.
- User Interface (Mobile App): A BLE client running on a smartphone that sends mood selection commands to the hardware.
- Connectivity Task (Core 0): An asynchronous task handling the BLE stack, reading received mood packets, and interfacing with the external AI API over WiFi to fetch specific animation parameters (like Bezier curve control points).
- Sensor Task (Core 0): Monitors the LDR light sensor through the ADC. It implements hysteresis logic to detect environmental state changes.
- Main Logic Control (Core 0): It parses JSON parameters from the API, manages the flower state machines (Opening, Closing, Resting, Breathing), and pushes direct movement commands into an inter-core FIFO queue.
- Actuator Control Task (Core 1): Dedicated task for real-time operations. It reads command buffers from the FIFO and drives the Servo Motors via PWM and the WS2812B LEDs via PIO, using Bezier interpolation for organic motion.
Log
- Week 1 - 4: Initial research. I spent time looking for the right hardware to balance the weight of the petals with the SG90 servos. I also started reading about some concepts and the async syntax in Rust.
- Week 5 -7 May: Ordered the main components, soldered the pins for the Pico 2W.
- Week 8: I started working on the petals, using cooper wire and cooper tubes for the movements, soldering the petals to the tubes.
Hardware
The project uses:
- Raspberry Pi Pico 2W
- 3xSG90 micro servos
- WS2812B LED strip
- LDR
- SSD1306 OLED
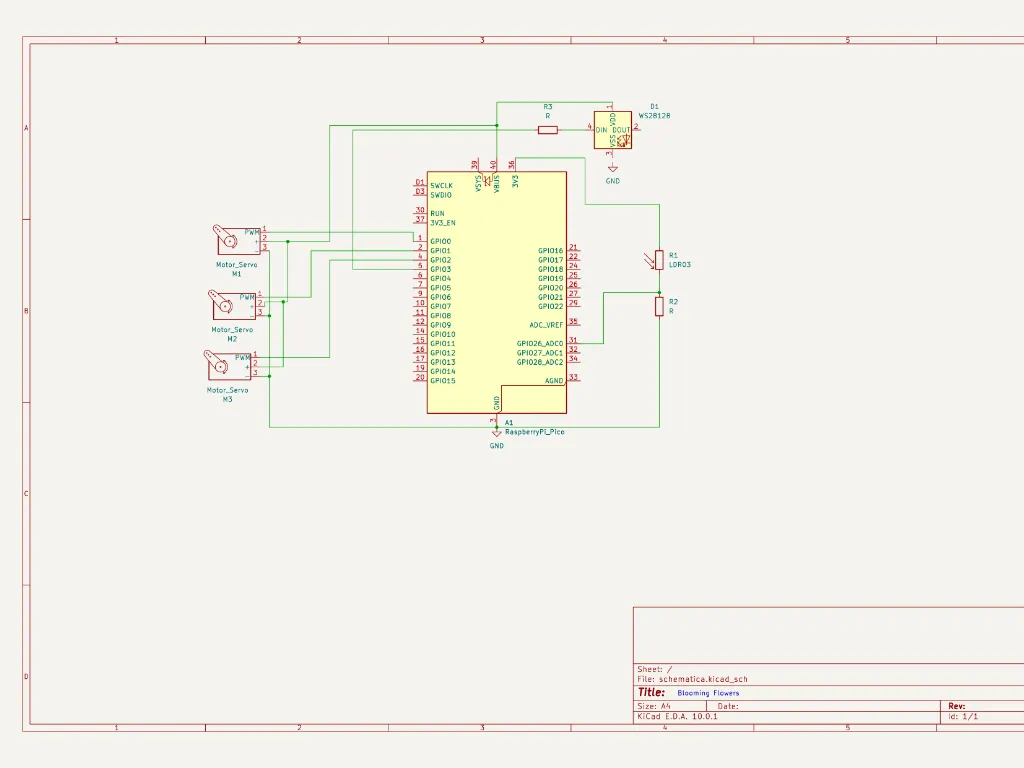
Schematics
Bill of Materials
| Device | Usage | Price |
|---|---|---|
| Raspberry Pi Pico 2W | Main MCU with WiFi/BLE | 45 RON |
| Micro Servo SG90 (x3) | Petal movement | 45 RON |
| WS2812B LED Strip | Ambient lighting | 30 RON |
| SSD1306 OLED | Status display | 20 RON |
| LDR Sensor & Caps | Light sensing & power filtering | 15 RON |
| Buck Regulator 5V 3A | Powering the servos | 15 RON |
Software
| Library | Description | Usage |
|---|---|---|
embassy-rp | HAL for RP2350 | Async GPIO, PWM, PIO, and ADC |
embassy-executor | Async runtime | Managing concurrent tasks across both cores |
serde-json-core | No-std JSON parser | Parsing AI API responses from WiFi |
ssd1306 | I2C Display driver | Driving the OLED status dashboard |
fixed | Fixed-point math | Calculating Bezier curves without an FPU |