Automated Optical Sorting System
An automated system designed to identify and sort objects based on their optical properties and weight using an STM32 microcontroller and Rust (Embassy).
Author: Ariana Sadeghi
GitHub Project Link: GitHub Repo
Description
The project consists of an industrial-style sorting line that uses a TCS34725 color sensor to detect the RGB signature of objects and an HX711 load cell for weight validation. Based on the sensor data, a custom calibration algorithm classifies the items. A mechanical arm (SG90 servomotor) acts as the sorting mechanism, while a stepper motor drives the conveyor belt continuously. The system's status and detected colors are visually fed back in real-time through an SPI TFT display.
Motivation
I chose this project to explore the integration of multiple digital communication protocols (I2C, SPI) and precise motor control (PWM and Stepper sequences) in a real-time automation scenario using the Embassy async framework in Rust.
Architecture
Main Components
- Sensing Module: TCS34725 Color Sensor (I2C) for optical recognition and HX711 Amplifier with a Load Cell for weight detection.
- Control Logic: Continuous polling loop acting as a state machine for detection, classification, and precise timing delays.
- Actuation Module: 28BYJ-48 Stepper motor (with ULN2003 driver) for the conveyor belt and an SG90 Servomotor (PWM) for the sorting arm.
- User Interface: TFT LCD display controlled via SPI to show current calibration data and detected colors.
Log
- Week 5 - 11 May: Project idea selection and hardware requirements gathering. Basic component testing (Stepper and Servo motors) and pinout planning.
- Week 12 - 18 May: Color sensor (TCS34725) I2C integration, TFT display SPI setup, and writing the initial color calibration logic.
- Week 19 - 25 May: Finalizing the state machine integration in Rust, fine-tuning the RGB calibration thresholds for specific object colors, adjusting servo timings to sync with the conveyor belt, and completing GitHub documentation.
Hardware
The system is built around an STM32 Nucleo board programmed in Rust. The main peripherals include:
- TCS34725: RGB Color Sensor for object detection.
- HX711: Load cell amplifier with a 1kg/5kg load cell.
- 1.8" TFT Display: SPI-driven screen for visual feedback.
- 28BYJ-48 Stepper Motor & ULN2003: Drives the conveyor belt.
- SG90 Servomotor: Acts as the sorting arm.
Schematics

Physical Implementation
Below are the layout views of the fully assembled automated sorting system, showcasing the conveyor alignment, sensor housing, and mechanical integration.
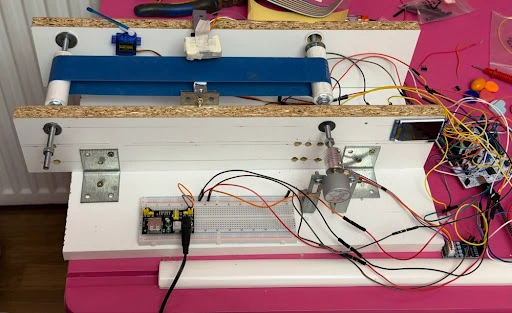 Figure 1: Overall assembly of the conveyor belt line and electronics integration.
Figure 1: Overall assembly of the conveyor belt line and electronics integration.
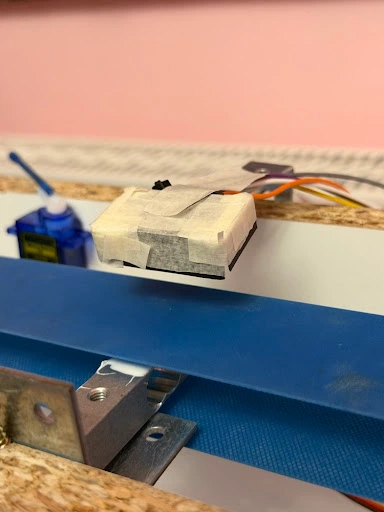 Figure 2: Close-up of the TCS34725 color sensor featuring a custom paper shield to block ambient light reflections.
Figure 2: Close-up of the TCS34725 color sensor featuring a custom paper shield to block ambient light reflections.
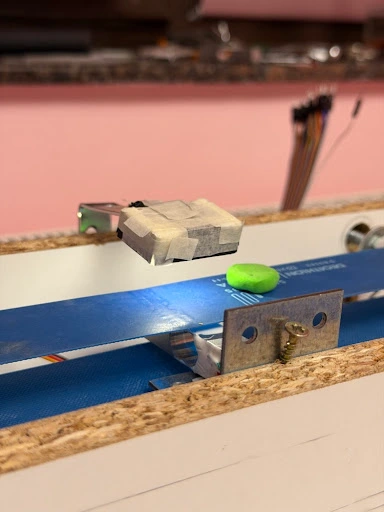 Figure 3: Color sensor actively scanning an object passing underneath on the conveyor belt.
Figure 3: Color sensor actively scanning an object passing underneath on the conveyor belt.
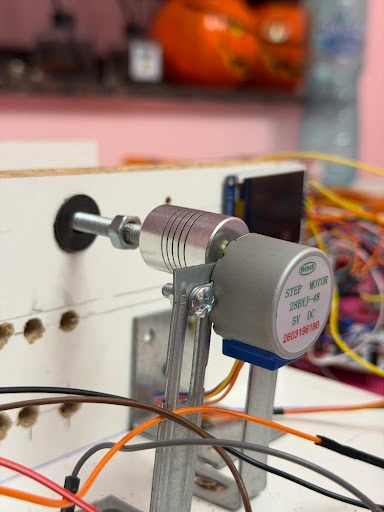 Figure 4: The 28BYJ-48 stepper motor and mechanical coupling driving the conveyor belt.
Figure 4: The 28BYJ-48 stepper motor and mechanical coupling driving the conveyor belt.
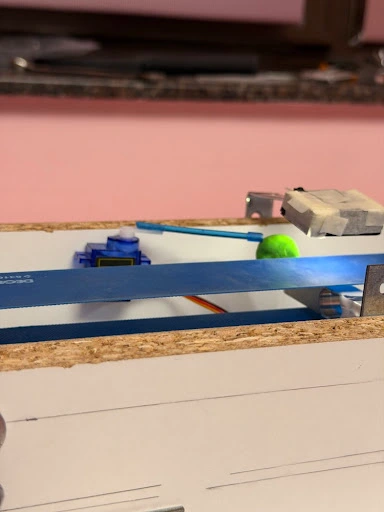 Figure 5: SG90 servomotor configured as the sorting arm, positioned to intercept rejected items.
Figure 5: SG90 servomotor configured as the sorting arm, positioned to intercept rejected items.
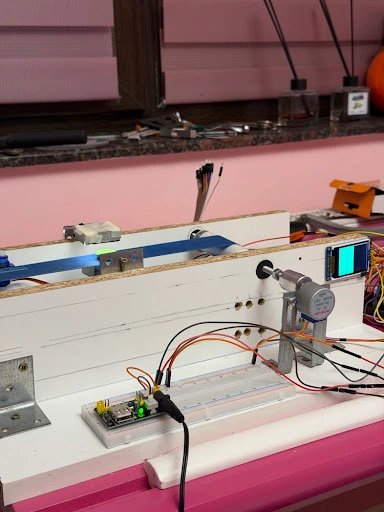 Figure 6: The 1.8" SPI TFT display providing real-time visual feedback of the detected colors.
Figure 6: The 1.8" SPI TFT display providing real-time visual feedback of the detected colors.
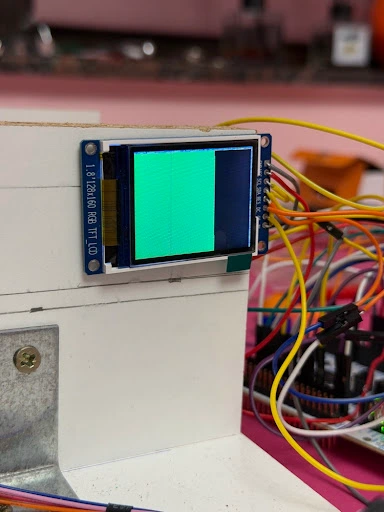 Figure 7: Close-up view of the TFT screen displaying active color recognition.
Figure 7: Close-up view of the TFT screen displaying active color recognition.
 Figure 8: The STM32 Nucleo board handling all I2C, SPI, and PWM signals asynchronously.
Figure 8: The STM32 Nucleo board handling all I2C, SPI, and PWM signals asynchronously.
Bill of Materials
| Device | Usage | Price |
|---|---|---|
| STM32 Nucleo Board | Main Microcontroller | - |
| TCS34725 Module | Optical/Color Sensing | 22,68 RON |
| HX711 | Weight Sensing | 4,57 RON |
| Load Cell | Weight Sensing | 12,80 RON |
| 1.8" TFT Display | User Interface | 40,62 RON |
| 28BYJ-48 | Conveyor movement | 10,29 RON |
| ULN2003 | Conveyor movement | 4,97 RON |
| SG90 Servomotor | Sorting Arm | 9,49 RON |
Software
Concurrency & Async Execution
The software architecture leverages the cooperative multitasking model provided by the Embassy framework in Rust. Since the stepper motor requires precise step impulses every 3ms to maintain constant conveyor speed, a traditional blocking approach (delay_ms) would freeze sensor polling and screen updates. By utilizing async/await and asynchronous hardware timers (Timer::after_millis), the system interleaves the conveyor drive loop, the I2C color polling, and the SPI screen drawing tasks seamlessly. This ensures zero jitter for the motor and deterministic real-time execution without the overhead of a traditional RTOS.
System State Machine The control loop operates as a finite state machine (FSM) with the following operational transitions:
- IDLE / SCANNING: Conveyor belt runs continuously; the system polls the TCS34725 Clear channel waiting for a threshold drop.
- COLOR_IDENTIFICATION: Object detected; RGB channels are sampled and evaluated against the software-defined calibration boundaries.
- WEIGHT_VALIDATION: The system captures data from the HX711 load cell using a moving average filter to determine and validate the mass.
- SORTING_ACTION: A specific PWM duty cycle is sent to the SG90 servomotor after a precise kinematic delay, moving the arm to sort the object.
- RESET: The servo returns to its default position (0°), the TFT display resets to idle status, and the FSM returns to the scanning state.
High-Level Logic Practically, the software follows these stages during a successful sorting cycle:
- Movement: The stepper motor runs continuously using a non-blocking sequence to drive the conveyor belt.
- Detection: Continuous polling of the TCS34725 sensor via I2C to read Clear, Red, Green, and Blue light channels, alongside weight readings from the HX711.
- Decision: Comparing RGB values against preset, fine-tuned thresholds to identify specific colors (e.g., White, Yellow, Pink, Purple, Brown).
- Action: Updating the TFT display with the detected color and triggering a precise PWM sequence to extend and retract the Servo arm at the exact moment the object passes.
Libraries and Drivers
| Library | Description | Usage |
|---|---|---|
embassy-stm32 | Hardware Abstraction (HAL) | Peripheral control (I2C, SPI, PWM, GPIO) |
embassy-time | Time Management | Delay management and timing for the stepper/servo |
defmt / defmt-rtt | Logging Framework | Real-time debugging and color calibration output |