Automated Chessboard
A fully automated chess system featuring a CoreXY magnetic mechanism for autonomous piece movement.
Author: Babacea Alexandru
GitHub Project Link: https://github.com/UPB-PMRust-Students/acs-project-2026-AlexandruBabacea-student
Description
The Automated Chessboard project involves the development of a fully automated chess system that allows both human-versus-human gameplay (with move validation) and human-versus-AI gameplay.
The core innovation and complexity lie in the hidden mechanism that moves the pieces autonomously. This utilizes a CoreXY rail system positioned beneath the playing surface. This allows an electromagnet to navigate under the board and drag the magnetic chess pieces to their new positions. The detection of piece locations on the board is achieved through an 8x8 matrix of 64 magnetic sensors.
Motivation
This project was undertaken to integrate complex mechanical design with embedded software and artificial intelligence. The goal is to demonstrate how embedded Rust can be used to manage precise motor control (CoreXY kinematics), high-density sensor arrays and algorithmic decision-making in a real-time, physical interactive system.
Architecture
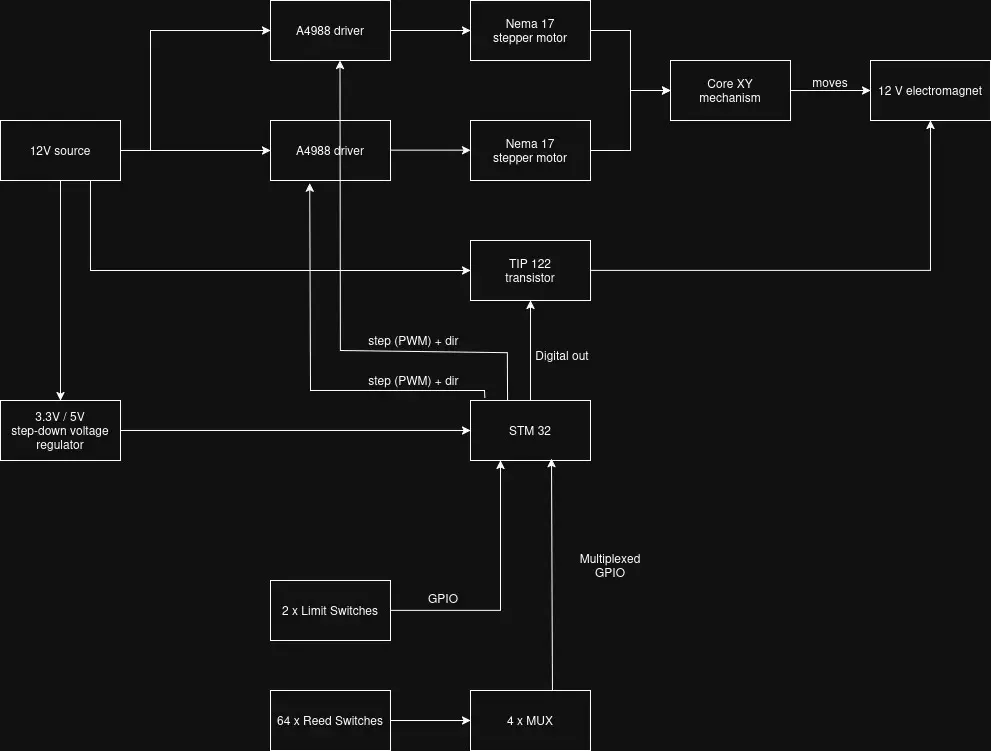
The system architecture comprises the following modules:
- Processing Module: An STM32 microcontroller serves as the central processing unit, running both the game logic (chess engine) and the motion logic (step generation).
- Actuation Module: Controls the physical movement using two Nema 17 stepper motors and a powerful electromagnet.
- Detection Module: A grid of 64 magnetic Reed sensors read via external multiplexers, compensating for the limited GPIO pins on the microcontroller.
Log
Weeks March 16th - March 29th
Researched and finalized the bill of materials. Placed orders for the necessary electronic and mechanical components. Initiated the 3D printing process for the custom magnetic chess pieces.
Weeks March 30th - April 12th
Prepared the physical structure by cutting the V-slot aluminum profiles and the OSB base panel. Successfully assembled the main outer frame of the chessboard and completed the 3D printing of the structural parts.
Weeks April 13th - April 26th
Installed the CoreXY mechanical drive system, including pulleys, timing belts, and the Nema 17 stepper motors. Developed and executed the initial test scripts to validate motor movement and control via the A4988 drivers.
Weeks April 27th - May 10th
Finalized the physical enclosure by adding the side walls and the top playing surface complete with the chess sticker. Installed the initial piece detection matrix, wiring and validating the first two rows of reed switches through a multiplexer. Furthermore, integrated the transistor-controlled electromagnet and successfully executed the first physical test to move a piece.
Week May 11th - May 17th
Connect all reed switches to the MUXs and the STM32 Nucleo. Reprint the 3D chess pieces to make them lighter and use only one magnet. Write the software to read all reed switches and mirror all the moves that the white player makes.
Hardware
The hardware setup includes an STM32 microcontroller, 64 magnetic Reed sensors for piece detection, two Nema 17 stepper motors for the CoreXY movement and a 12V electromagnet to physically drag the pieces.
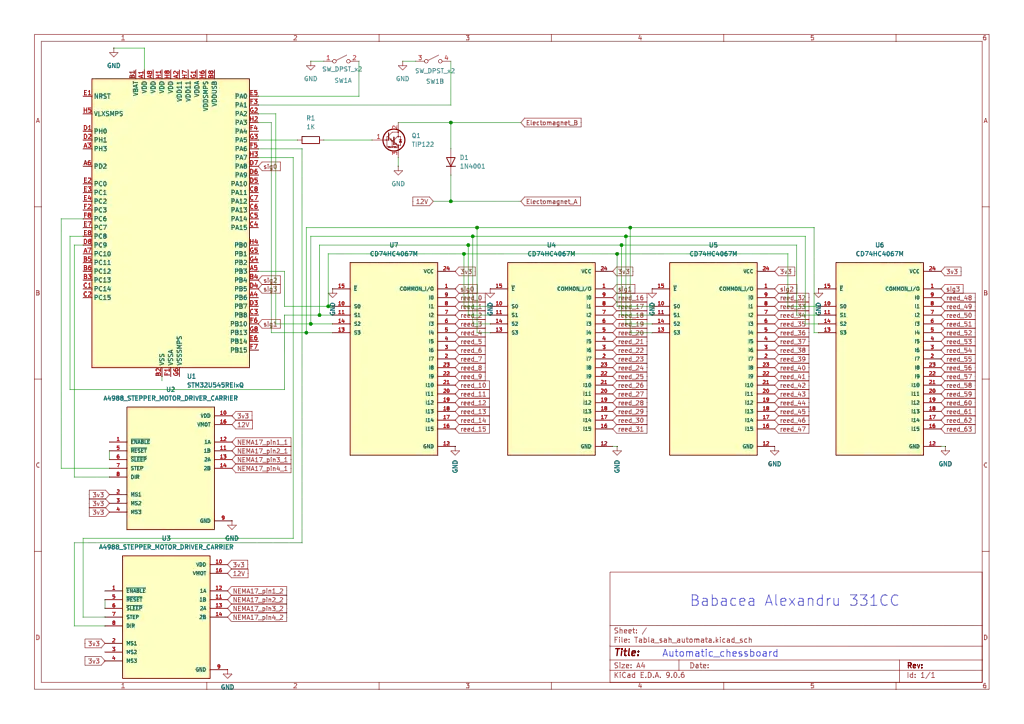
Schematics
Photos
| Frame | Components |
|---|---|
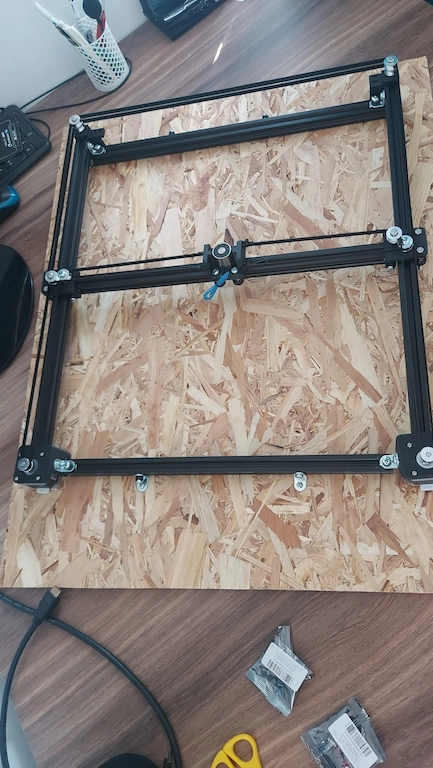 |  |
Bill of Materials
| Device | Usage | Price | Link |
|---|---|---|---|
| STM32 Microcontroller | Main processing unit | 121 RON | Link |
| Nema 17 Stepper Motor | CoreXY movement | 2 x 67 RON | Link |
| A4988 Stepper Driver | Motor control | 2 x 8 RON | Link |
| 12V Electromagnet (5kg) | Moving the chess pieces | 7.51 EURO | Link |
| TIP122 Transistor + Diode | Electromagnet control | 5 RON | - |
| Reed Sensor | Piece detection matrix | 64 x 1.86 RON | Link |
| CD74HC4067 Multiplexer | Sensor matrix reading | 4 x 4.76 RON | Link |
| Endstop limit switch | Axis calibration (homing) | 2 x 5.23 RON | Link |
| V-slot profiles and belts | Mechanical frame | 5 x 24.79 RON | Link |
| Mini V wheels | Smooth movement along the axes | 93,68 RON | Link |
| Neodymium magnets | Inside the chess pieces | 37.92 RON | Link |
Software
| Library | Description | Usage |
|---|---|---|
| embassy-rs | Asynchronous framework | Efficient task management and hardware abstraction |
| embassy-stm32 | HAL for STM32 | Controlling PWM for steppers and GPIO for sensors |
| defmt | Logging framework | Real-time debugging and telemetry |