Air Defense System
A smart defense turret that uses 3D scanning to detect objects and launch a physical projectile.
Author: Constantin-Rareș Trufaș
GitHub Project Link: https://github.com/UPB-PMRust-Students/acs-project-2026-Titirez-RT
Description
The project is an Air Defense Turret designed for continuous environment scanning and target interaction. The system is built around an STM32 Nucleo microcontroller, coordinating a dual-axis positioning system: a stepper motor that performs a 0° to 359° horizontal sweep and a servomotor for vertical pitch control.
Distance detection is handled by a Time-of-Flight sensor, providing high-precision mapping as the turret pans. The system operates autonomously, identifying targets within its scanning arc and triggering a mechanical solenoid strike upon detection. Real-time system data and target telemetry are displayed on an integrated TFT screen. To ensure stable operation, the turret includes a dedicated power management circuit designed to handle the high-current requirements of the solenoid and drive motors.
This project combines hardware engineering and automated sensing into a high-speed demonstration of real-time response.
Motivation
The project started with the idea of building a radar that identifies objects on a digital display. I was fascinated by the process of mapping sensor data onto a screen, but I wanted to push the complexity further. To challenge myself, I moved beyond simple monitoring and added a launch mechanism, transforming a passive radar into an active turret that physically reacts to its environment.
Architecture
The project is built like a team where every part has a specific job, all coordinated by a central processor to keep the movement smooth and the firing accurate.
Main Components:
- The Controller: An STM32 Nucleo board acts as the central processor. It monitors sensors, processes user input and coordinates all motor movements.
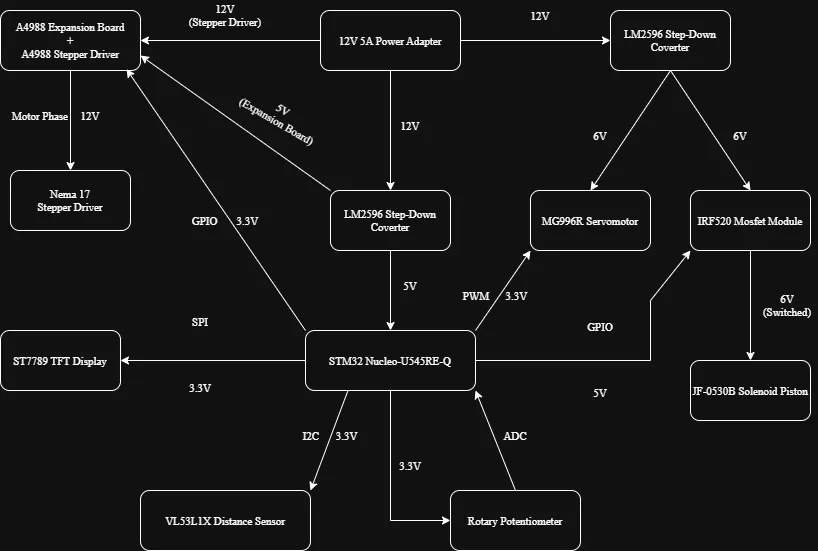
- Power Supply: A 12V source is distributed into three specific rails:
- 12V for the stepper motor;
- 6V for the servo and solenoid;
- 5V for the logic circuits and sensors.
- The Aiming System: Enables dual-axis motion using a Stepper Motor for horizontal rotation (Pan) and a Servomotor for vertical positioning (Tilt).
- The Sensors: A Distance Sensor provides real-time ranging data, while a Potentiometer allows for manual calibration and fine-tuning.
- The Trigger: A Solenoid Piston handles the mechanical firing. It is controlled via a MOSFET, which allows the microcontroller to safely switch the high-current 6V load.
- The Display: A TFT Screen provides a real-time interface, showing target distance, system telemetry and operational status.
Log
Week 6 - 12 April
- I focused on researching the project theme and defining its core functionality.
- I explored different radar concepts and how to integrate object detection with a mechanical response to set a clear direction for the project.
Week 20 - 26 April
- This week was dedicated to searching for and ordering all the necessary hardware components.
- I focused on sourcing the sensors, motors and power management modules required to bring the system to life.
Hardware
The project integrates high-performance components to achieve autonomous detection and response. The STM32 Nucleo acts as the brain, processing data from the VL53L1X ToF sensor to map the environment. Motion is handled by a Nema 17 stepper motor for precise horizontal scanning and an MG996R servomotor for manual vertical adjustment via a potentiometer.
To handle physical action, an IRF520 MOSFET triggers a solenoid piston. The entire system is powered by a 12V 5A source, stabilized by LM2596 buck converters and a 1000µF capacitor to prevent resets during high-current spikes. Visual feedback is provided by a ST7789 TFT display, showing real-time radar telemetry.
Schematics
--> TODO
Bill of Materials
| Device | Usage | Price |
|---|---|---|
| STM32 Nucleo-64 Board | Central processing unit that controls sensors and motors | 112.47 RON |
| Distance Sensor | ToF sensor used for high-precision object detection | 60 RON |
| Servomotor | Controls the vertical tilting of the turret | 29.51 RON |
| Stepper Motor | Drives the horizontal 360° rotation of the system | 91.62 RON |
| Stepper Driver | Translates logic signals into power for the stepper motor | 2x 8.09 RON |
| Step-down Converter | Steps down 12V to 5V/6V for logic and servo power | 2x 6.69 RON |
| Stepper Expansion Board | Simplifies wiring between the driver and the motor | 9.97 RON |
| TFT Display | Shows real-time radar data and system telemetry | 30.64 RON |
| Solenoid Piston | Provides the mechanical strike when a target is detected | 24.74 RON |
| Rotary Potentiometer | Allows manual adjustment of the turret's vertical tilt angle | 13.65 RON |
| Breadboard | Used for prototyping and connecting all components | 10 RON |
| 12V 5A Power Adapter | The main power source for the entire turret system | 50.70 RON |
| DC Female Jack Adapter | Connects the power adapter to the breadboard wires | 4.14 RON |
| IRF520 MOSFET Module | Electronic switch used to trigger the 6V solenoid | 12.60 RON |
| Rectifier Diodes | Protect the circuit from solenoid spikes | 15.13 RON |
| Capacitor | Stabilizes voltage and prevents system resets | 2x 5.08 RON |
| Total | - | 504.89 RON |
Software
| Library | Description | Usage |
|---|---|---|
| embassy-stm32 | Hardware Interface | Connects Rust code to physical pins |
| embassy-time | Time Management | Handles delays for motor speed and timing |
| embassy-executor | Task Manager | Runs scanning and detection tasks simultaneously |
| defmt | Debug Logging | Sends real-time status messages for debugging |
| panic-probe | Error Handling | Reports crashes via the debug interface |
| vl53l1x | ToF Sensor Driver | Reads distance data from the sensor via I2C |
| st7789 | Display Driver | Controls the TFT screen over SPI |