Formula 1 Miniature Car
A Bluetooth-controlled Formula 1 miniature car with onboard camera and real-time sensor monitoring via a web server.
Author: Stefania Tudor
GitHub Project Link:
https://github.com/UPB-PMRust-Students/proiect-stefaniatudor
Description
The Formula 1 Miniature Car project involves the development of a scaled-down Formula 1 car model, remotely controlled via Bluetooth using a gaming controller. The car is equipped with an onboard camera for video transmission and a web server that displays real-time statistics such as speed and wheel temperature.
Key features include:
- Bluetooth Control: Enables remote operation of the car using a gaming controller.
- Onboard Camera: Provides live video feed from the car's perspective.
- Sensor Integration: Monitors speed and wheel temperature in real-time.
- Web Server: Displays sensor data through a user-friendly interface.
Motivation
This project was undertaken to bridge the gap between theoretical knowledge and practical application. It integrates various aspects of embedded systems, including sensor data acquisition, motor control, wireless communication, and real-time data visualization. The goal was to create a comprehensive system that demonstrates the capabilities of embedded Rust programming in a real-world scenario.
Architecture
The system architecture comprises the following components:
- Microcontroller: Raspberry Pi Pico 2 serves as the central processing unit, managing all operations.
- Sensors:
- LM75B Temperature Sensors (x4): Monitor the temperature of each wheel.
- MPU6050 Accelerometer and Gyroscope: Track the car's orientation and movement.
- Actuators:
- DC Motor: Provide propulsion for the car.
- Stepper Motor: Handles steering by adjusting the front wheel orientation in response to joystick input.
- Drivers:
- L9110S Motor Drivers (x2): Interface between the microcontroller and DC motors.
- ULN2003 Stepper Motor Driver: Controls the stepper motor for DRS.
- Web Server: Hosts the interface displaying sensor data and live video.

Log
Week 5 - 11 May
During this week, the initial concept of the Formula 1 miniature car was developed. The components were selected and partially assembled. First tests focused on validating connectivity between the Pico, sensors, and motor drivers.
Week 12 - 18 May
Hardware assembly was finalized. The initial LM35 analog temperature sensors were replaced with LM75B digital sensors to ensure accurate readings via I2C. All sensors and actuators were tested successfully on the breadboard.
Week 19 - 25 May
The embedded software was completed. WebSocket data streaming, sensor acquisition, and motor control were fully implemented. The onboard camera functionality was removed to focus on performance and simplify system integration.
Hardware
The hardware setup includes:
- Microcontroller: Raspberry Pi Pico 2
- Sensors:
- LM75B Temperature Sensors (x4)
- MPU6050 Accelerometer and Gyroscope
- Actuators:
- DC Motor (x1)
- Stepper Motor
- Drivers:
- L9110S Motor Driver
- ULN2003 Stepper Motor Driver
- Power Supply: 9V Battery
Schematic

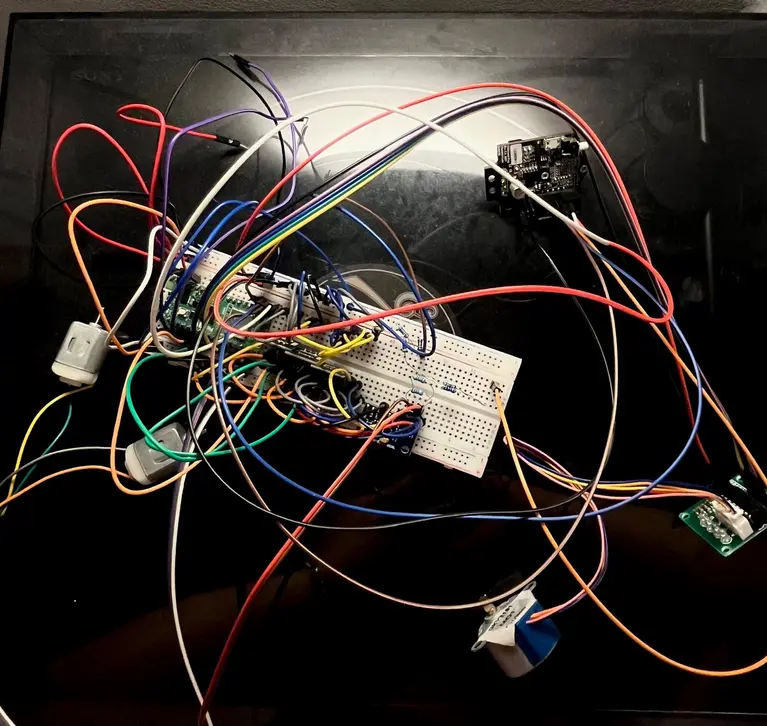
Pictures
Bill of Materials
| Item | Quantity | Estimated Price (RON) | Total (RON) | Usage |
|---|---|---|---|---|
| GY-6500 (Gyro + Magnetometer) | 1 | 24.90 | 24.90 | Motion sensing (gyro + mag) |
| L9110S Motor Driver | 1 | 8.50 | 8.50 | Dual DC motor driver |
| 28BYJ-48 Stepper Motor | 1 | 11.50 | 11.50 | DRS mechanism (stepper) |
| Miniature DC Motor 3–6V | 2 | 5.00 | 10.00 | Main propulsion motors |
| LM35 Temperature Sensor | 4 | 4.90 | 19.60 | Ambient/motor temperature sensing |
| ULN2003 Stepper Driver | 1 | 6.50 | 6.50 | Drives stepper motor (DRS) |
| 9V Battery Holder with Wires | 2 | 2.50 | 5.00 | Power supply (motor + peripherals) |
| Raspberry Pi Pico 2W (Optimus) | 2 | 39.66 | 79.32 | Main controller & wireless communication |
| PixyCam 2 | 1 | 299.00 | 299.00 | Visual tracking and object detection |
Software
The software is developed entirely in Rust, utilizing the embassy-rs asynchronous framework for efficient task management. Key functionalities include:
- Motor Control: PWM signals generated for precise motor operation.
- Sensor Data Acquisition: I2C communication with temperature and motion sensors.
- Web Server: Hosts a real-time dashboard displaying sensor data and live video feed.
- WebSocket Protocol: Used to send and receive compact, real-time control and telemetry messages between the car and the remote control server.
Links
- pygame Documentation – Python joystick interface used to control the car