Smart Elevator
Author: Lazar Mihai
GitHub Project Link: https://github.com/UPB-PMRust-Students/proiect-mihailazar6
Description
Modern elevators can waste time and energy by stopping at unnecessary floors or responding inefficiently to requests. This project introduces a smarter elevator that processes requests in real time, prioritizing efficient travel and reducing both wait times and energy consumption.
Motivation
I chose this project because it addresses a real-world need for smarter, more efficient building systems. Elevators are critical for accessibility and convenience, and optimizing their operation can have a significant impact on energy use and user experience. This project combines my interest in automation and control with the challenge of creating a practical solution that benefits everyday life.
Architecture

Main Components
🟦 Input Module: Floor Request Buttons
- Function: Simulate user requests for specific floors.
- Details: Each button is wired to a GPIO input on the Raspberry Pi Pico 2W.
🟨 Input Module: MFRC522 RFID Module
- Function: Simulate card-based access.
- Details: The MFRC522 module is connected to the Raspberry Pi Pico 2W via SPI and GPIO.
🟪 Controller Module: Raspberry Pi Pico 2W
- Function: Central brain that processes button inputs, manages the elevator request queue, determines optimal direction, and issues movement commands.
- Features: Real-time scheduling, efficient route planning, and queue management logic.
🟧 Output Module: Stepper Motor & Floor Indicators
- Stepper Motor: Simulates elevator movement between floors, controlled via the A4988 driver.
- LED Indicators: Display the current elevator floor and travel direction.
🔗 Component Connections
| Component | Connection | Purpose |
|---|---|---|
| Buttons | GPIO Inputs | Capture floor requests from users |
| Pico 2W Logic | GPIO Outputs | Control LEDs and stepper motor driver |
| A4988 Driver | Stepper Motor Pins | Translate Pico signals to motor movement |
| LEDs | GPIO Outputs | Indicate elevator position & direction |
| MFRC522 | SPI & GPIO | Read RFID cards for priority access |
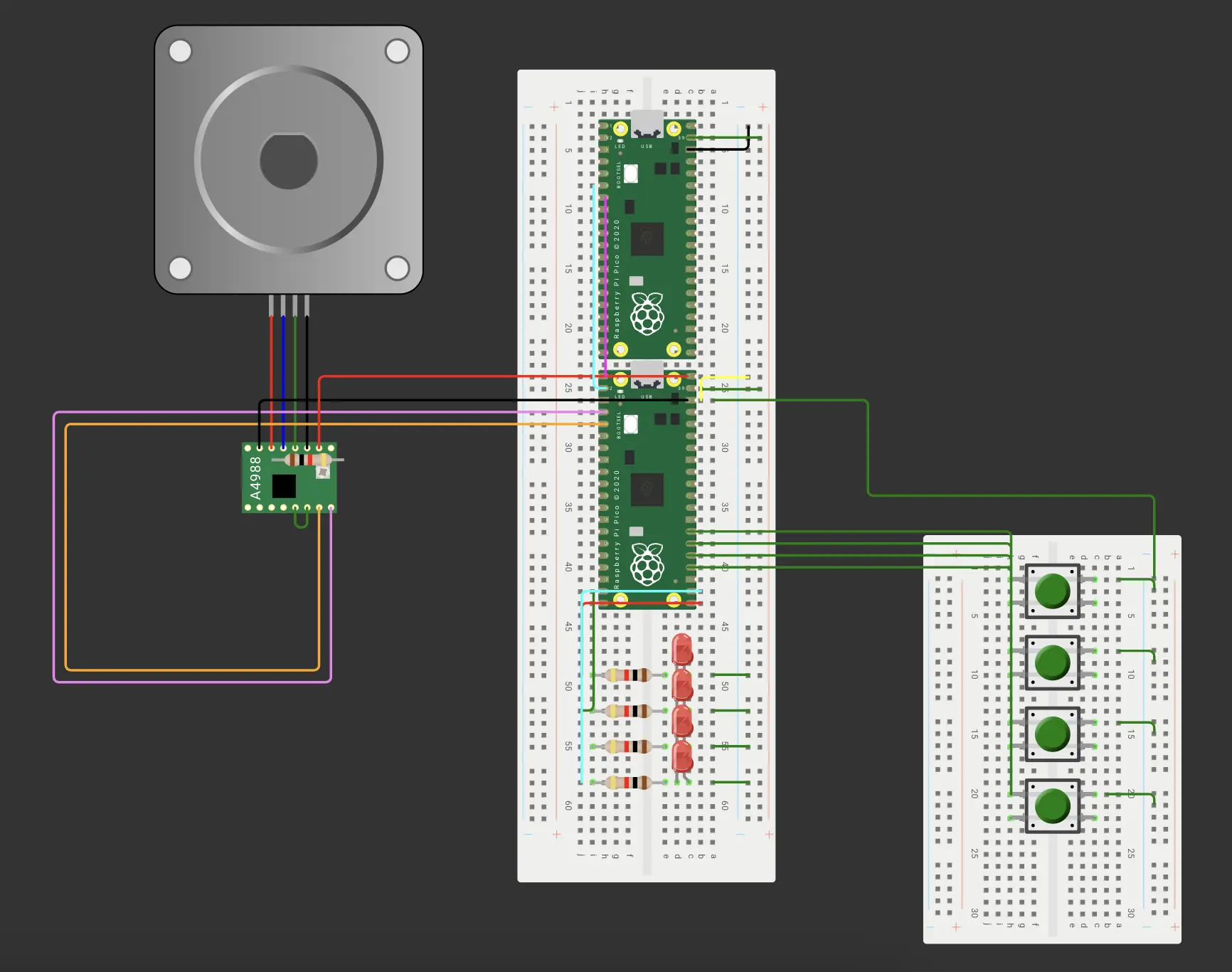
Schematic Overview:
- Buttons → Pico 2W (GPIO Inputs)
- Pico 2W (Logic) → LEDs & A4988 (GPIO Outputs)
- A4988 → Stepper Motor (Controls elevator movement)
Log
Week 5 - 11 May
Week 12 - 18 May
Week 19 - 25 May
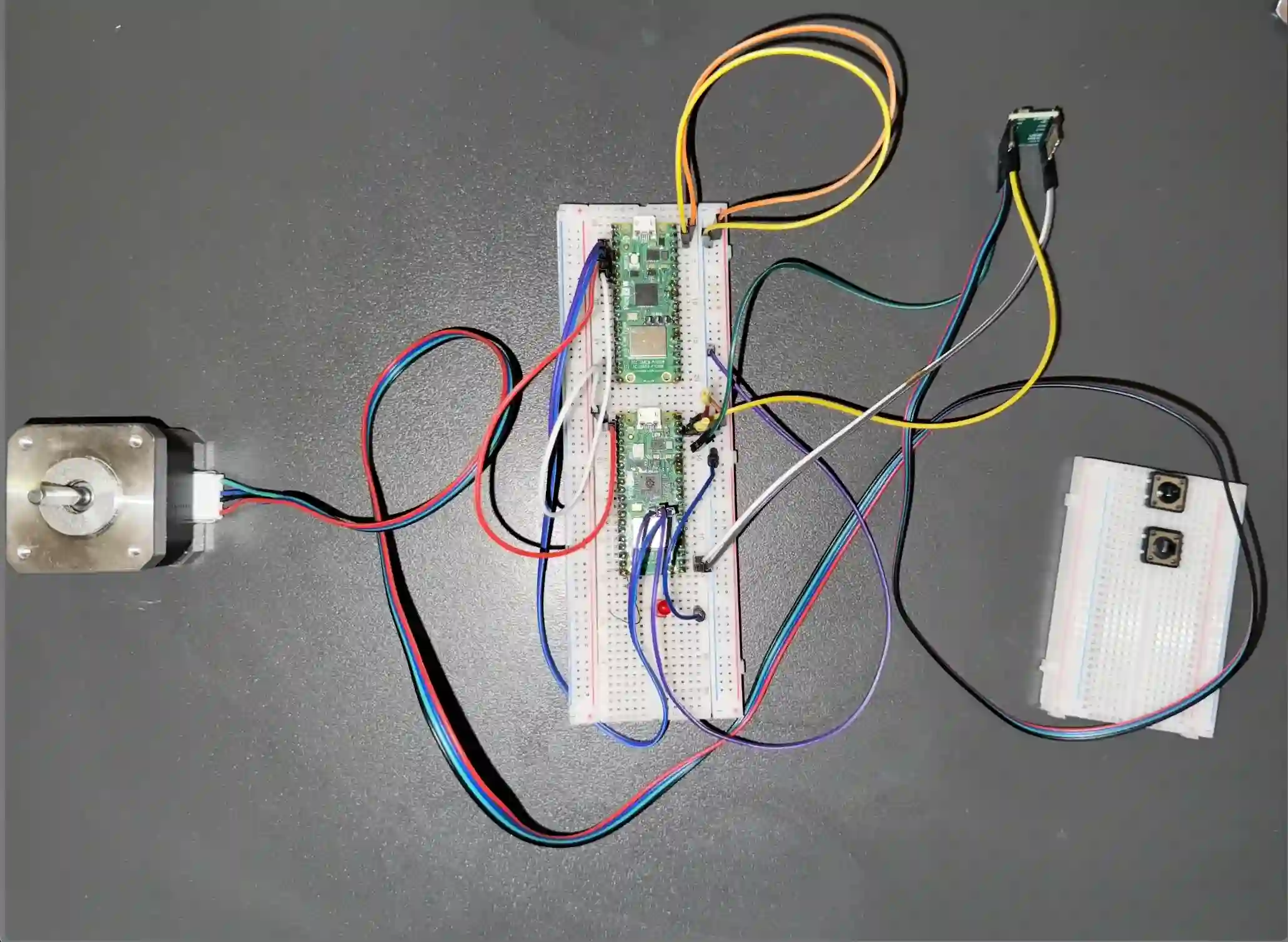
Hardware
The hardware components used in this project are:
-
🟢 Raspberry Pi Pico 2W
Acts as the main controller, processing all elevator logic. -
⬛ Push Buttons
Simulate floor requests and elevator calls. -
💡 LEDs
Indicate elevator position and movement. -
🔗 Breadboard & Jumper Wires
Facilitate easy prototyping and circuit connections. -
🌀 Resistors
Protect LEDs and ensure reliable button input (pull-down configuration). -
⚙️ Stepper Motor
Physically simulates elevator movement between floors. -
🟩 A4988 Stepper Motor Driver
Precisely controls the stepper motor. -
🔌 Power Supply (USB)
Powers the Raspberry Pi Pico and peripherals. -
🔔 Buzzer
Provides auditory feedback for floor arrivals and events. -
🟨 MFRC522 RFID Module
Simulate card-based access.
These components combine to create an interactive, physical model of a smart elevator system—enabling the practical exploration of efficient control algorithms, real-time feedback, and responsive user interaction.
Schematics
Bill of Materials
| Device | Usage | Price |
|---|---|---|
| Raspberry Pi Pico 2W | The microcontroller | 35 RON |
| Push Buttons (10 pack) | Floor request and elevator call buttons | 5 RON |
| LEDs (assorted colors, 100 pack) | Floor indicators and movement display | 25 RON |
| Breadboard | Circuit prototyping | 15 RON |
| Jumper Wires (40 pack) | Connecting components | 10 RON |
| Resistors Kit (600 pcs) | LED circuits and button pull-downs | 30 RON |
| USB Cable | Power supply for Raspberry Pi Pico | 10 RON |
| NEMA 17 Stepper Motor | Motor for the elevator | 45 RON |
| A4988 Stepper Motor Driver | Driver for the stepper motor | 20 RON |
| Buzzer (5V, 5mm) | Auditory feedback for floor arrival and other events | 5 RON |
| MFRC522 RFID Module | Card-based access or priority call | 10 RON |
| Total | 160 RON |
Software
| Library | Description | Usage |
|---|---|---|
| embassy-executor | Async runtime for embedded systems | Runs async tasks on the microcontroller |
| embassy-net | Networking stack for embedded systems | Provides networking capabilities (TCP/IP, etc.) |
| embassy-rp | Hardware abstraction layer for Raspberry Pi Pico | Low-level access to Pico peripherals |
| embassy-time | Time-related utilities for embedded systems | Async timers, delays, and timeouts |
| static-cell | Static memory allocation | Enables safe static data storage |
| defmt-rtt | Logging over RTT (Real-Time Transfer) | Real-time logging for debugging |
| panic-probe | Panic handler for debug probes | Captures panics for debugging via probe |
| defmt | Logging framework for embedded systems | Efficient debug output |
| embedded-hal-bus | Hardware abstraction layer bus implementations | Shared bus abstractions (I2C, SPI, etc.) |
| mfrc522 | Driver for the MFRC522 RFID reader | Controls and interfaces with RFID module |