Obstacltron
A compact Raspberry Pi-powered robot adept at avoiding obstacles.
Author: Matei Eduard Gabriel
GitHub Project Link: Obstacltron on GitHub
Description
Obstacltron is an obstacle avoider robot built using Raspberry Pi Pico W. It utilizes an L298N motor driver, DC motors, and an HC-SR04 ultrasonic distance sensor.
Motivation
The motivation behind this project was to create a simple yet effective robot that can navigate its environment autonomously by detecting and avoiding obstacles. This project aims to showcase practical applications of robotics and sensor integration while providing a platform for experimentation and learning.
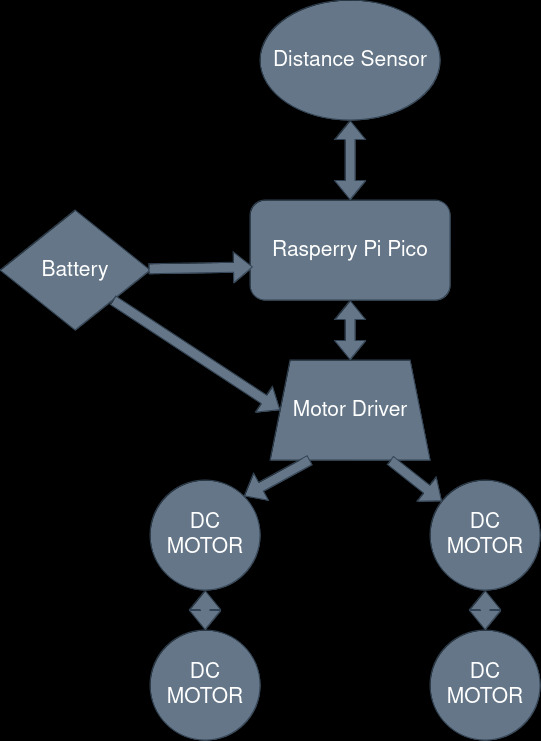
Architecture
-
Raspberry Pi Pico W: Chosen as the microcontroller unit due to its affordability and versatility.
-
L298N Motor Driver: Responsible for controlling the DC motors, offering bidirectional control and allowing precise manipulation of the robot's movement.
-
HC-SR04 Ultrasonic Sensor: Serves as the primary sensor for obstacle detection, utilizing ultrasonic waves to measure distances accurately.
-
DC Motors: These motors are the driving force behind the robot's movement, enabling it to navigate its environment.
Components
- Raspberry Pi Pico W: Microcontroller unit
- L298N Motor Driver: Controls the DC motors
- HC-SR04 Ultrasonic Sensor: Detects obstacles
- DC Motors: Drive the robot's movement
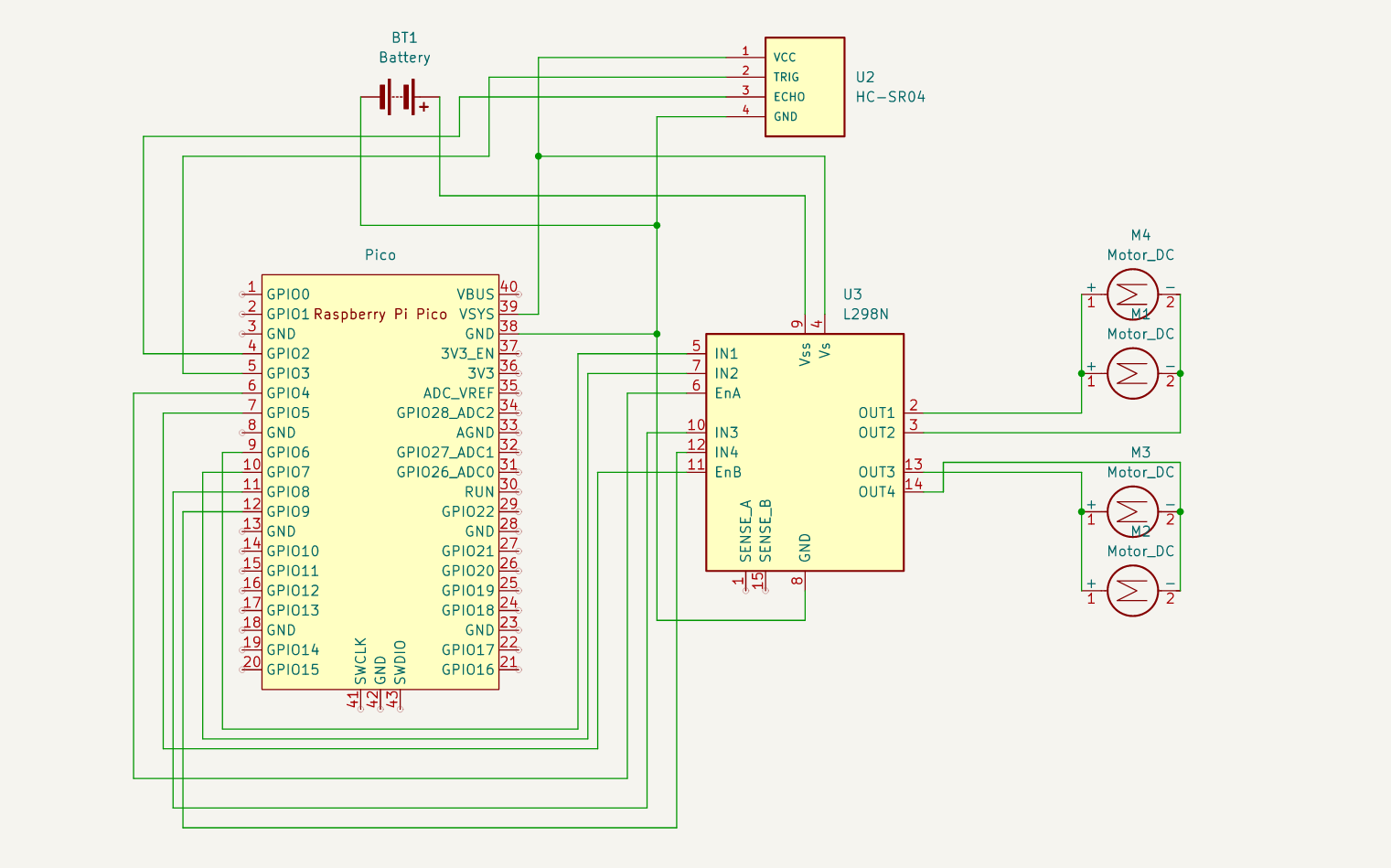
Connection
- Raspberry Pi Pico W and L298N Motor Driver are connected via GPIO pins.
- The DC motors are connected to the output terminals of the L298N Motor Driver.
- The HC-SR04 Ultrasonic Sensor is connected to the Raspberry Pi Pico W.
Log
Week 6 - 12 May
Acquired the required parts and researched the feasibility of the project. This phase involved understanding the specifications of each component and planning the integration.
Week 7 - 19 May
Assembled all the parts and wired everything up. This step involved careful connection of the components according to the schematics and initial power-up testing to ensure all parts were functional.
Week 20 - 26 May
Writing the software for the robot and testing
Hardware
Hardware Diagram
Completed Robot

Schematics
KiCad Schematic
Bill of Materials
| Device | Usage | Price |
|---|---|---|
| Raspberry Pi Pico W | Microcontroller | 35 RON |
| L298N Motor Driver | Motor Driver | 9 RON |
| HC-SR04 Ultrasonic Sensor | Distance sensor | 7 RON |
| 2x 9V Battery | Power Source | 5 RON |
Software
| Library | Description | Usage |
|---|---|---|
| embassy | Rust framework for embedded programming | Used for writing correct, safe and asynchronous code, particularly targeted at embedded systems |
| L298N | Rust crate for L298N | Used for driving the motors |
| HC-SR04 | Rust crate for HC-SR04 distance sensor | Used for calculating the distance to the object in front |
Links
1. Inspiration video: Obstacle Avoider Youtube Video
2. Inspiration video: Obstacle Avoider Youtube Video 2
3. Ultrasonic sensor: Datasheet
4. L298N H-Bridge: Datasheet