03 - Exceptions & Interrupts
The purpose of this lab is to understand how exceptions and hardware interrupts work and how they can be used, how to set a hard fault handler, register interrupts and use interrupts with embassy-rs.
Resources
- Joseph Yiu, The Definitive Guide to ARM® Cortex®-M0 and Cortex-M0+ Processors, 2nd Edition
- Chapter 4 - Architecture
- Section 4.4 - Stack Memory Operations
- Section 4.5 - Exceptions and Interrupts
- Chapter 8 - Exceptions and Interrupts
- Section 8.1 - What are Exceptions and Interrupts
- Section 8.2 - Exception types on Cortex-M0 and Cortex-M0+
- Section 8.3 - Brief Overview of the NVIC
- Section 8.4 - Definition of Exception Priority Levels
- Section 8.5 - Vector Table
- Section 8.6 - Exception Sequence Overview
- Chapter 11 - Fault Handling
- Section 11.1 - Fault Exception Overview
- Section 11.2 - What Can Cause a Fault
- Section 11.7 - Lockup
- Raspberry Pi Ltd, RP2040 Datasheet
- Chapter 2 - System Description
- Section 2.7 - Boot sequence
- Section 2.8 - Bootrom
- Subsection 2.8.1 - Processor Controlled Boot Sequence
What is an exception?
Exceptions describe any condition that requires the processor to stop what it is doing and do something else. Section 2.3.2 of Cortex-M0+ Devices generic User Guide lists 7 types of exceptions:
| Exception | Priority | Descriptions |
|---|---|---|
| Reset | -15 | Triggered by the system at startup to start the software |
| NMI | -14 | Non Maskable Interrupts, an external interrupt that cannot be ignored, usually used for low latency peripheral needs the attention of the MCU |
| HardFault | -13 | Triggered by the MCU in case of a fault (div by 0, memory fault, ...) |
| SVC | -5 | Supervisor call, triggered usually by a process running on top of the embedded operating system when it wants to make a system call |
| PendSV | -2 | Used for pending system calls |
| SysTick | -1 | Triggered by a periodic timer, usually used by an embedded operating system for context switch |
| Interrupt (IRQ) | 0 and above | Triggered by a peripheral, or generated by a software request |
What is an interrupt?
A hardware interrupt is a type of exception which is a synchronous or asynchronous signal from a peripheral that signals the occurrence of an event that must be handled by the processor. Interrupt handling has the effect of suspending a program's normal thread of execution and launching an interrupt service routine (ISR).
Generally, to associate an interrupt with a specific routine in the program, the processor uses the interrupt vector table (IVT). In this table, each interrupt is associated with the address to which the program will jump when the interrupt is triggered. These addresses are predefined and are mapped in program memory.
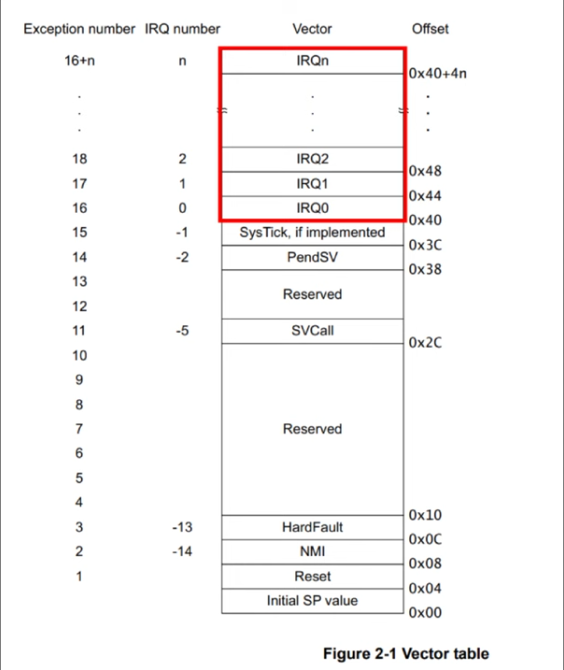
The image above illustrates the whole vector table of ARM Cortex-M0. It includes exceptions mapped from address 0x04 to 0x40+4n (n depends on the processor type). Lower address means higher priority. Higher priority exceptions can interrupt lower priority exceptions.
Exception and Interrupt Handling
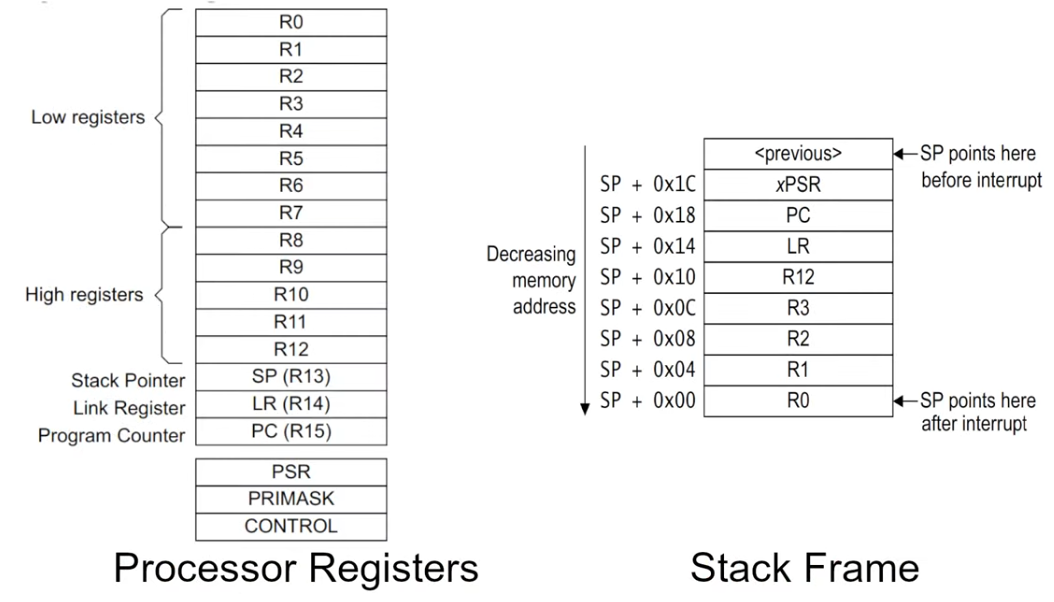
When an interrupt request happens the first thing that the processor does is to memorize its current state. For ARM Cortex-M0 this happens by pushing 8 words or registered data into the main stack to provide the information need to return the processor to what it was doing before before the interrupt request was called. This part is called the stack frame and it includes registers 0 through 3, register 12, the link register, the program counter and the program status register.
ARM Cortex-M microcontrollers also use a Nested Vectored Interrupt Controller (NVIC).The NVIC is specifically designed to handle these interrupts more efficiently. Interrupt addresses in the NVIC memory region are set according to their priority: the lower the address, the higher the priority. As suggested by the "Nested" in its name, the NVIC supports nested interrupts. This means that if a higher priority interrupt occurs while another interrupt is being processed, the controller can pause the current interrupt service routine (ISR), handle the higher priority interrupt, and then resume the interrupted ISR. This feature is crucial for responsive and real-time processing.
Registering handlers
Exception handlers are registered using the exception macro provided by the cortex-m-rt crate.
#[exception]
unsafe fn ExceptionName() {
}
The name of the exception handler function matters, as this is the way the exception macro knows for which exception to
register the handler. Valid exception names are HardFault, SysTick, or any other exception name of the MCU.
Interrupt handlers are registered using the interrupt macro provided by the cortex-m-rt crate.
#[interrupt]
unsafe fn IRQ_NAME() {
}
The name of the interrupt handler function matters, as this is the way the interrupt macro knows for which interrupt to
register the handler. Valid exception names are any of the provided interrupts.
RP2040
The RP2040 is an ARM Cortex-M0+ dual core processor. It does have some particularities.
Boot
The RP2040 boots from an internal bootloader that sets the initial interrupt IVT.
The before starting the actual code written into Flash, the internal bootloader loads a secondary bootloader that is written in Flash (the first 256 bytes) together with the developer's app. This is the bootloader section that was described in lab 02.
The IVT that the Flash application provides start after the secondary bootloader, at address 0x100.

Interrupts
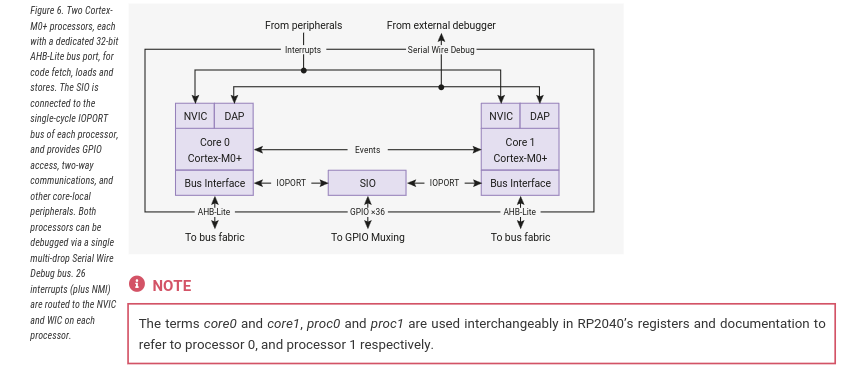
The RP2040 chip has two cores (processors), and each core has its own NVIC. Each core's NVIC is connected to the same set of hardware interrupt lines with one exception: IO Interrupts. In the RP2040, IO interrupts are organized by banks, and each core has its own set of IO interrupts for each bank. The IO interrupts for each core are completely independent. For instance, Processor 0 (Core 0) can be interrupted by an event on GPIO pin 0 in bank 0, while Processor 1 (Core 1) can be interrupted by a separate event on GPIO pin 1 in the same bank. Each processor responds only to its own interrupts, allowing them to operate independently or to handle different tasks simultaneously without interfering with each other.
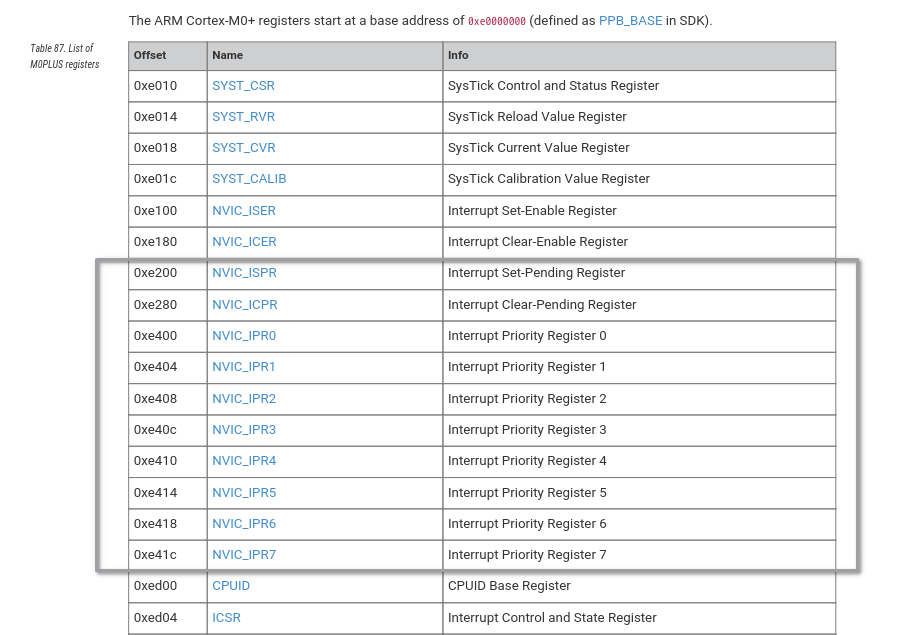
Available interrupt request signals (IRQ)
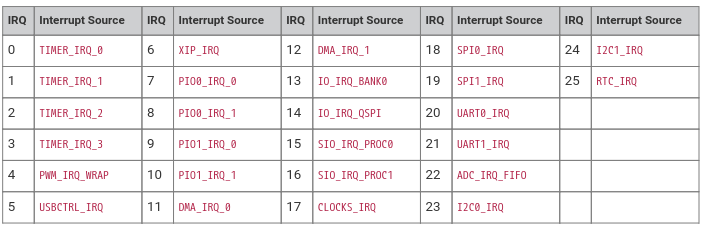
On RP2040, only the lower 26 IRQ signals are connected on the NVIC, as seen in the table below, and IRQs 26 to 31 are tied to zero (never firing). The core can still be forced to enter the relevant interrupt handler by writing bits 26 to 31 in the NVIC ISPR register.
The priority order is determined for these signals is determined by :
- First, the dynamic priority level configured per interrupt by the
NVIC_IPR0-7registers. The Cortex-M0+ implements the two most significant bits of an 8-bit priority field, so four priority levels are available, and the numerically-lowest level (level 0) is the highest priority. - Second, for interrupts with the same dynamic priority level, the lower-numbered IRQ has higher priority (using the IRQ numbers given in the table above)
GPIO Interrupts
All GPIO pins in Raspberry Pi Pico support interrupts. The interrupts can be classified into three types:
- Level High: An interrupt occurs while a pin is HIGH or at logic 1.
- Level Low: An interrupt occurs while a pin is LOW or at logic 0.
- Rising Edge: Interrupt occurs when a pin transitions from a LOW to HIGH.
- Falling Edge: Interrupt occurs when a pin transitions from HIGH to LOW.

Inspect binaries
When working in Rust, rust-objdump can be used to inspect the compiled output to see sections and interleaved code. This is particularly useful to inspect code and debug.
Install cargo binutils
Before you can use rust-objdump with Rust projects, you'll need to install cargo-binutils.
cargo install cargo-binutils
rustup component add llvm-tools-preview
Check section headers
rust-objdump --section-headers target/thumbv6m-none-eabi/debug/<executable_name>
Sections:
Idx Name Size VMA Type
0 00000000 00000000
1 .vector_table 000000c0 10000100 DATA
2 .boot_loader 00000100 10000000 DATA
3 .text 00000b10 100001c0 TEXT
4 .rodata 000001a4 10000cd0 DATA
5 .data 00000000 20000000 DATA
6 .gnu.sgstubs 00000000 10000e80 TEXT
7 .bss 00000000 20000000 BSS
8 .uninit 00000000 20000000 BSS
9 .debug_abbrev 00001bce 00000000 DEBUG
10 .debug_info 00025316 00000000 DEBUG
11 .debug_aranges 000014b8 00000000 DEBUG
12 .debug_str 0003c860 00000000 DEBUG
13 .debug_pubnames 000175c6 00000000 DEBUG
14 .debug_pubtypes 00000ee6 00000000 DEBUG
15 .comment 00000073 00000000
16 .ARM.attributes 00000032 00000000
17 .debug_frame 00004444 00000000 DEBUG
18 .debug_line 00023790 00000000 DEBUG
19 .debug_ranges 00016df8 00000000 DEBUG
20 .debug_loc 00000074 00000000 DEBUG
21 .symtab 00000970 00000000
22 .shstrtab 00000103 00000000
23 .strtab 00000fe4 00000000
Disassemble a specific section
rust-objdump --disassemble -j .section_name target/thumbv6m-none-eabi/debug/<executable_name>
cargo objdumb and rust-objdump tools use llvm's objdump tool.
Some terminals do not parse parameters proxied to llvm-objdump command.
If this happens please use llvm-objdump script directly like so
llvm-objdump <path_to_binary> --section.headers
Handling a HardFault
There are several reasons why a hard fault is triggered:
- invalid memory reads and writes
- invalid address of the reset handler (not the case for RP2040, as the real reset handler is in the Bootrom)
- invalid address of the initial stack pointer (not the case for RP2040, as the real reset handler is in the Bootrom)
- using the svc instruction in the HardFault handler
- using the svc instruction NMI handler
Register a HardFault handler
The cortex-m-rt crate allows an easy way of registering a hard fault handler by using
the exception macro.
#[exception]
unsafe fn HardFault(_frame: &ExceptionFrame) -> ! {
loop{}
}
The ExceptionFrame parameter contains the state of the processor at the moment of the hard fault occurred.
It contains the stack frame (registers) that the processor pushed on the stack.
The hard fault handler is not allowed to return, as usual. Unless an embedded operating system is used, this error is not recoverable.
Triggering a hard fault
The easiest way of forcing a hard fault is to try to read or write to or from a memory location that is not valid.
For the RP2040, an invalid memory address is 0xf000_0000.
// define an invalid memory address
const INVALID_ADDRESS: *mut u32 = 0xf000_0000 as *mut u32;
// write to it
unsafe {
// this triggers a hard fault
write_volatile(INVALID_ADDRESS, 0);
}
Handle Interrupts
This labs presents two ways of handling interrupts:
- using the embedded-hal standard which implies actually registering interrupt handlers
- using embassy which is a framework that provides an API that uses interrupts

Handle Interrupts using Embedded HAL
Setting up an interrupt is a bit more complicated than handling a simple exception because we also need to enable that interrupt and bind it to the signal coming from a peripheral. Additionally, we need to manually clear the interrupt (signal that we handled the interrupt) in the interrupt handler, otherwise as soon as the interrupt handler finishes, it gets called again.
RP2040 Embedded HAL
Setting up interrupts requires a lot of register logic. To make this task easier, instead of using directly
the PAC, we can use a crate that implements the embedded-hal traits and which exports easier functions.
We need a way to make sure that the data we access and modify stays consistent, regardless of when ISR are called and executed.
The rp2040-hal crate provides such functionality.
Critical Section
As interrupts can fire at any time, there is no way to know when the normal application flow will be interrupted. This can happen while writing data to registers or while reconfiguring the interrupts.
The critical-section crate does just that.
For single core MCUs (the way in which we use in this lab the RP2040) critical_section::with function simply
disable any interrupts while in the critical section.
critical_section::with(|cs| {
// on cortex-m single core MCUs
// run code that should not be interrupted
});
Dependencies
To make sure we can use rp2040-hal and critical-section, we have to add the following dependencies to
the Cargo.toml file.
# offers the critical section API
critical-section = "1.1.2"
# the "critical-section-impl" features provides the implementation of
# the critical-section API for rp2040
rp2040-hal = { version = "0.10.0", features = ["rt", "critical-section-impl"] }
Setting the interrupt handler
The #[interrupt] macro allows us to register a function as interrupt handler.
Usually interrupt handlers have to access global data. Due to Rust's safety rules, this is not
directly allowed. The Rust compiler needs to make sure at compile time that there is no way
the code could corrupt the data that it reads or writes.
This is why interrupts handler
have to use critical_section to access data.
use rp2040_pac::interrupt;
#[interrupt]
unsafe fn IO_IRQ_BANK0() {
critical_section::with(|cs| {
// access global data
});
}
Configure the GPIO pins
In this example we want to trigger the IO_IRQ_BANK0 interrupt when a pin is pressed. We have
to use the rp2040-hal API to configure
the GPIO pins.
use rp2040_hal::gpio::{
FunctionSioInput, Pin, Pins, PullUp,
};
// get the peripherals
let mut peripherals = Peripherals::take().unwrap();
// initialize the SIO (this is different from PAC, as we use the rp2040-hal)
let sio = Sio::new(peripherals.SIO);
// initialize the pins part of SIO
let pins = Pins::new(
peripherals.IO_BANK0,
peripherals.PADS_BANK0,
sio.gpio_bank0,
&mut peripherals.RESETS,
);
// configure the input pin
// replace X with a pin number
let pin: Pin<GpioX, FunctionSioInput, PullUp> = pins.gpioX.reconfigure();
Do not forget to replace the X in GpioX and gpioX with an actual pin number.
Please note the way the pin was configured. The configuration is written into the data type,
that is Pin<GpioX, FunctionSioInput, PullUp>) instead of the reconfigure function's parameters. This is one of Rust's
important features, as it prevents using invalid functions on pin that was configured in a certain way.
The data type returned by the reconfigure function simply does not have functions that do not work
for the configuration.
Enable interrupt
Now that the interrupt handler is registered and the pin is configured, we can enable the interrupt.
use rp2040_hal::Interrupt;
// Trigger on the 'falling edge' of the input pin.
// This will happen as the button is being pressed
pin.set_interrupt_enabled(Interrupt::EdgeLow, true);
Enable the IO_BANK0 IRQ in the NVIC
While the interrupt has been enabled inside the IO_Bank0 peripheral, we still need to ask the NVIC peripheral to signal the processor then IO_Bank0 triggers the interrupt. This is done using the API of the PAC crate.
unsafe {
rp2040_pac::NVIC::unmask(rp2040_pac::Interrupt::IO_IRQ_BANK0);
}
Without enabling the interrupt in NVIC, the MCU will never be interrupted by the IO_IRQ_BANK0
interrupt, as NVIC will never signal the MCU. In this situation, we say that the NVIC masks the interrupt.
Handling the interrupt
Several pins can be configured to trigger the IO_IRQ_BANK0 interrupt. It is the ISR's (handler's) job
to talk to IO_BANK0 and ask which pin triggered the interrupt. Moreover, the interrupt will stay active until
the ISR asks the IO_BANK0 to clear it.
To perform this task, the ISR needs access to the pin variable that we configured before. The problem is
that this pin variable is a local variable, probably defined in the main function. As Rust does not
allow global variables, we have to use a combination of the critical-section API and a Mutex.
First, we define a data type structure that will hold the global variables that we need. For this example it holds the pin.
struct GlobalData {
pin: Pin<GpioX, FunctionSioInput, PullUp>
}
Next we have to define a static variable of type GlobalPin. Just defining the static variable is not enough,
as Rust will never allow us to modify it. Rust does not allow global mutable static variables due to safety reasons.
static GLOBAL_DATA: Mutex<Cell<Option<GlobalData>>> = Mutex::new(Cell::new(None));
The type definition is a little long, let's take a close look at it:
- to be able to share
global_databetween themainfunction and the ISR, we have to use aMutex, as the ISR can execute anytime. TheMutexassures that only one execution flow at a time can access the value sitting inside, in this example eithermaineither the ISR - to be able to modify the value inside the
Mutexwe have to wrap the value in aCell - to be able to have an initial unconfigured value, as the
GLOBAL_DATA's value is only configured withinmainwith actual data, we have tu use Rust's principle of NULL,Option, theGLOBAL_DATAwill be initially set toNone
We have to change the pin initialization and store the pin into the GLOBAL_DATA variable.
let local_data = GlobalData {
pin: pins.gpio25.reconfigure(),
};
As soon as we have the local_data variable initialized (using a local variable), we have to store it in to a global variable.
critical_section::with(|cs| {
GLOBAL_DATA.borrow(cs).replace(Some(local_data));
});
Clearing the interrupt in the interrupt handler
When the IO_IRQ_BANK0 interrupt triggers, we use the critical-section to retrieve the value of the
GLOBAL_DATA variable and use the pin field to ask IO_Bank0 to clear the interrupt that just triggered.
Failing to ask IO_Bank0 to clear the interrupt within the ISR will lead to the ISR being called again.
#[interrupt]
unsafe fn IO_IRQ_BANK0() {
critical_section::with(|cs| {
let mut global_data = GLOBAL_DATA.borrow(cs).take();
if let Some(ref mut data) = global_data {
// execute some actions
data.switch_a.clear_interrupt(Interrupt::EdgeLow);
}
GLOBAL_DATA.borrow(cs).replace(global_data);
});
}
The way this interrupt handler uses critical-section is not the most optimal, but it is the easiest to understand.
Interrupt handlers should execute as less code as possible inside the critical-section.
Handle Interrupts using Embassy
In Embassy, handling interrupts does not involve manually setting up interrupt service routines (ISRs) in the traditional sense that you might be used to with bare-metal or lower-level embedded programming. Instead, Embassy abstracts away the hardware-specific details and provides a higher-level async API for working with hardware events, including interrupts.
Embassy uses Rust's async/await syntax to provide an easier way to write non-blocking embedded applications. This approach allows you to wait for events (like GPIO pin changes, which could be triggered by hardware interrupts underneath), in a way that looks synchronous but is actually non-blocking and handled asynchronously by the Embassy executor.
The async and await mechanisms will be discussed in more detail in course_04 and lab_05.
Unlike the usb drive, GPIO pins don't need explicit interrupt binding. All interrupts handlers are already associated to the type of the input signal (rising edge, level low etc.)
For example, if you're waiting for a button press, you don't need to set up the interrupt yourself; you simply use Embassy's GPIO API to wait for the pin change event.
button.wait_for_rising_edge().await
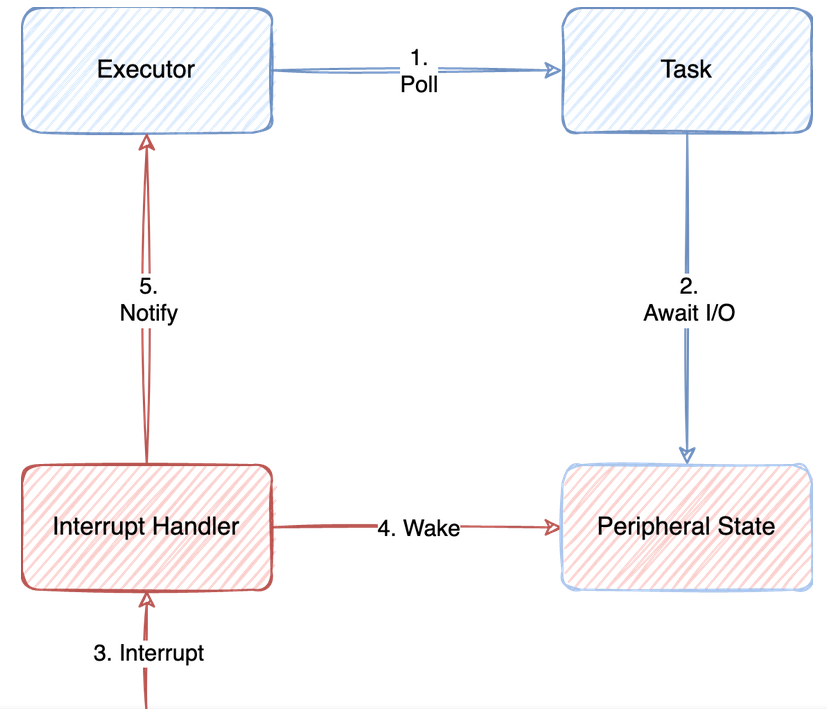
If we want the main loop to keep running regardless of the button state, we need to define a new task. A task in Embassy is an async function that will run in parallel with other tasks. It can pause its execution at certain points, waiting for some conditions to be met (like waiting for an I/O operation to complete, a timer to elapse, or an external event to occur), and then resume where it left off.
Define the task function
The task function receives the button as an parameter.
// replace X with the button's pin number
#[embassy_executor::task]
async fn button_pressed(mut button: Input<'static, PIN_X>) {
// initialize gpio
loop {
// Wait for the button button to be pressed
button.wait_for_rising_edge().await;
// Do something only if button was pressed
// (Here should be the logic for your interrupt request handler)
// Example: turn on the LED
}
}
Start the task
The main embassy task initializes the device and the button, starts the button_pressed task and does its work.
use embassy_executor::Spawner;
#[embassy_executor::main]
async fn main(spawner: Spawner) {
// let button = ...
// Spawn button_pressed and send the button an argument
spawner.spawn(button_pressed(button)).unwrap();
loop {
// Do something
// ...
}
}
Tasks are scheduled in a cooperative way. This means that the current task has to stop by using the await keyword and ask
the scheduler to schedule another task.
The main task has to use await at some point. Failure to do that will prevent the button_pressed task from running.
Sharing data with tasks
If several tasks need to share the same data, a Mutex similar to the one from Embedded HAL is needed.
If tasks just need to send values to each other, sending them as arguments should work.
Exercises
- Connect an LED1 to pin 0 and an LED2 to pin 1. Use KiCad to draw the schematics. (1p)
- Write a program using
embedded-halthat blinks the LED1. Userust-objdumpto display the sections. (2p)
You should be able to see the:
- bootloader section
- interrupt vector
- the code part (.text segment)
To blink a led using embedded-hal, take a look at Configuring GPIO Output in Embassy, from Lab 2. Embassy uses embedded-hal, so the functions for setting pin values to HIGH or LOW would be the same.
- Register a hard fault handler that blinks LED2. (3p)
- Generate a hard fault, you should see LED1 stop blinking (either on or off) and the LED2 blink
- Move the blinking LED2 code to the panic handler and call panic!() in
mainafter a few LED1 blink loops - Make sure panic is called when a hard fault is generated and generate a hard fault after a few LED1 blink loops
All crates used in this lab have a github repo, please check rp2040-hal's repository. You have there multiple examples of how to set up the gpio pins.
A very usefull example of how to setup multiple input and output pins and how to access them safely is: gpio_irq_example.rs.
The code written in hard fault handlers has to be very basic, as it is not very clear what triggered it. We suggest using bare metal to blink the LED. The code cannot assume that any peripheral is already initialized, as the fault might have occurred while initializing the board.
// reset IO Bank0
const RESET: u32 = 0x4000_c000;
const CLR: u32 = 0x3000;
const RESET_DONE: u32 = 0x4000_c008;
const GPIOX_CTRL: u32 = 0x4001_4004;
const GPIO_OE_SET: *mut u32 = 0xd000_0024 as *mut u32;
const GPIO_OUT_SET: *mut u32 = 0xd000_0014 as *mut u32;
const GPIO_OUT_CLR: *mut u32 = 0xd000_0018 as *mut u32;
// TODO - use fill in the GPIO number for LED2
const LED: u32 = ;
unsafe {
write_volatile((RESET + CLR) as *mut u32, 1 << 5);
while read_volatile(RESET_DONE as *const u32) & (1 << 5) == 0 {}
}
// set the LED pin the SIO function in IO_BANK0
let gpio_ctrl = (GPIOX_CTRL + 8 * LED) as *mut u32;
unsafe {
write_volatile(gpio_ctrl, 5);
};
// set the LED pin as output in SIO
unsafe {
write_volatile(GPIO_OE_SET, 1 << LED);
};
let mut value = 0;
loop {
value = 1 - value;
// write the value to the LED
let reg = match value {
0 => GPIO_OUT_CLR,
_ => GPIO_OUT_SET,
};
unsafe { write_volatile(reg, 1 << LED) }
// sleep
for _ in 0..5000 {
unsafe { asm!("nop") }
}
}
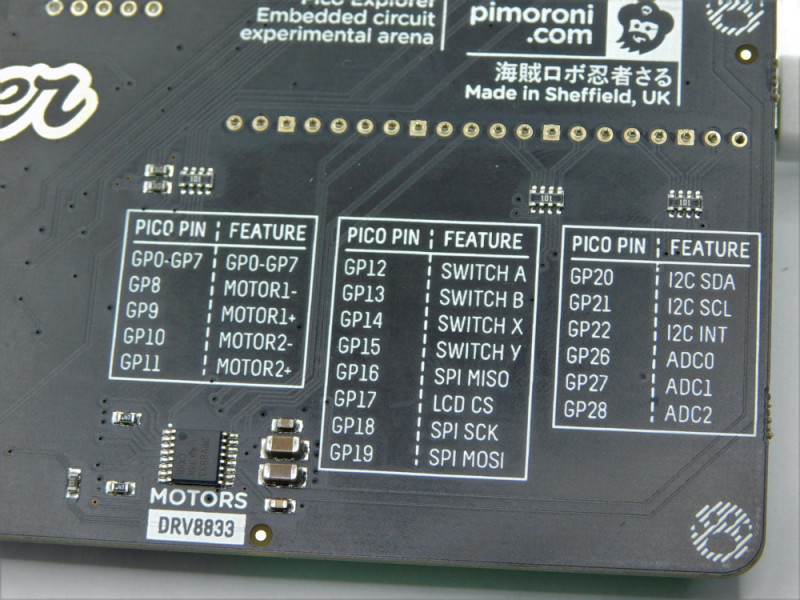
- Register an interrupt on the pin connected to button A. Toggle LED2 each time the button is pressed. (2p)
Look at the table on the back of the Pico Explorer Base to figure out to which pin button A is connected.
- Use
embassy-rsto obtain the same result. (2p)
Spawning a new task might be a good idea.